Last Updated on April 23, 2022 by Staff
This article marks a milestone in our chopsticking research. We have finally amassed enough analysis of chopstick grips, that we can attempt to properly classify them using factors that identify orthogonal dimensions, in the description of any given chopstick grip.
This classification could not be done until now. The main challenge was in identifying those orthogonal dimensions. We needed as few factors as possible, yet they must be able to describe every chopstick grip in full, with unique combination of values that differentiated every grip from all other grips.
As recounted in our retrospective, The Art and Science of Chopsticking, we did make a few attempts early on at crude classifications, starting with the Family Tree of Chopstick Grips which formed a connected graph of chopstick grips based on their visual similarities and incremental differences. We noted in Using vs not using the Thumb how all grips we’d seen could be roughly classified into two buckets: using or not using the thumb pad. We also disabused ourselves of the old wives’ tale that parallel chopsticks were good, and crossed chopsticks were no good. Instead, we discovered the three swing variants of any given basic chopstick grip, in Out with the Crossed Type, in with the Under Swing.
We have since made further strides. We believe that we now have a good set of factors to describe all grips we have analyzed. We have in fact use this classification already, to create a one-minute video showcasing a decision tree that determines chopstick teams of all TWICE members.
(At the first writing of this article, the classification table is incomplete, and only half accurate. One third of grips remain to be classified this way. The table will be finished and quality-checked over the next few weeks. This article is rushed out, to form the basis for a second video we are submitting to #VeritasiumContest)
Table of Contents
Chopstick Grips
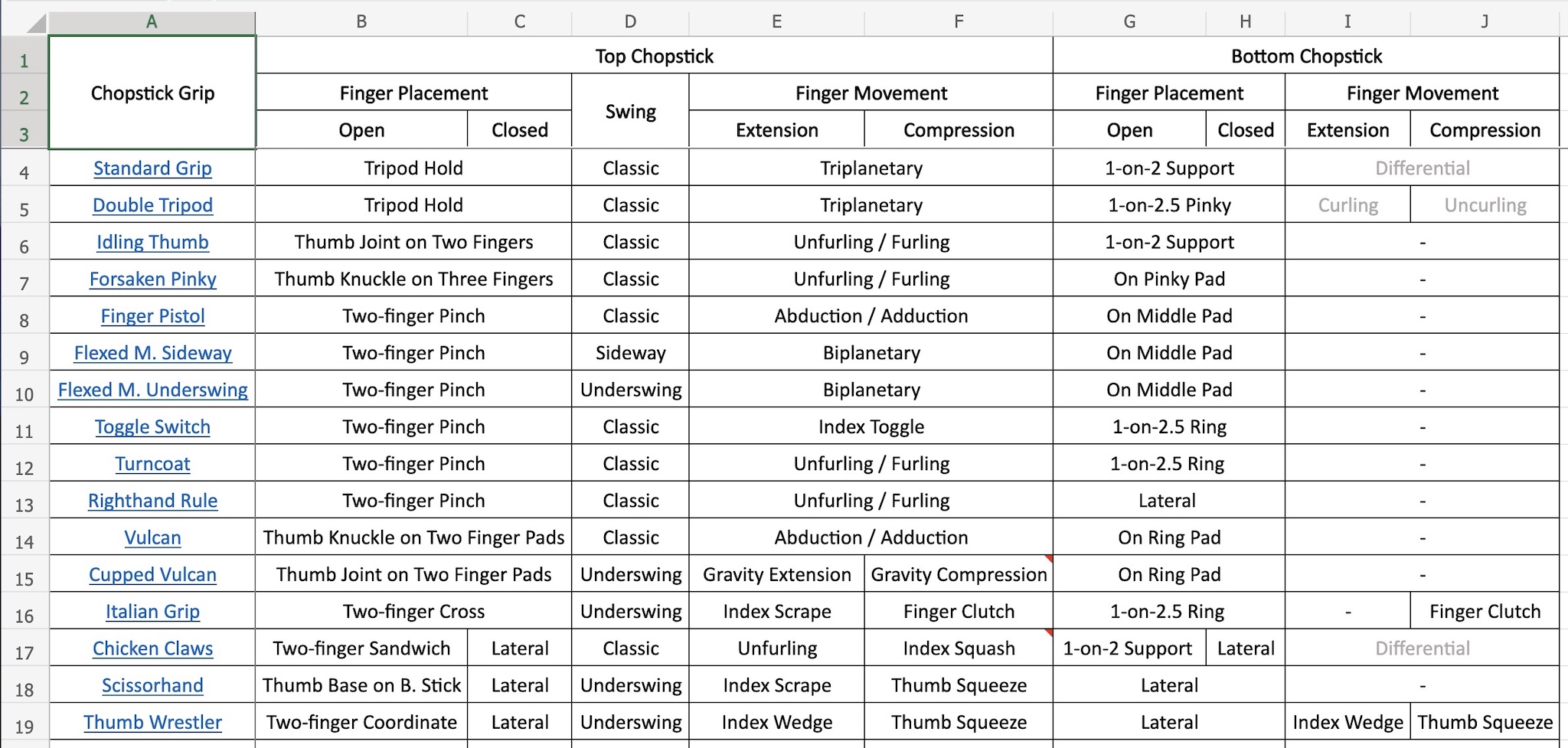
We classify all chopstick grips by describing each as a combination of finger placement and finger movement. These are further expanded to cover how top chopstick is held and moved, and how the bottom chopstick is held and moved. These are then further expanded to cover the closed posture vs. the open posture. In addition, we mark the swing type of each grip, to help orient the reader, even though the swing type is implied in the finger movement. Finally, we annotate the configuration formed by the two chopsticks when a practitioner exert compression forces on them to pinch payload (aka food). Whether rear ends of these two sticks abut each other at this compression posture turns out to be a key factor that differentiates otherwise similar grips. The same is true of whether the mid points of the two chopsticks abut each other for mechanical leverage, at this compression posture.
The main classification table is shown below. If you can’t see the Excel table in your browser, download the file explicitly.
This summary table shows at a glance relatedness and differences between any given two chopstick grips. We can clearly see that Chicken Claws, Scissorhand and Thumb Wrestler share similar closing finger placement, and closing finger movement. But we can tell that Chicken Claws differs from the other two, in that Chicken Claws sports a classic swing, while the other two are underswing variants. We can also see how Chicken Claws, unlike the other two, is also related to a very different grip, the Idling Thumb – both use similar (but not identical) mechanism for grasping and extending the top chopstick open.
Top Chopstick Finger Placement
If labels used in the last table, such as “Two-finger Pinch”, sound ambiguous and unclear to you, head over to the next table which defines exactly what any “Top Chopstick Finger Placement” label means. By finger placement we mean how fingers grasp the top chopstick. Some finger placements are given nicknames. These are ones we have extensively discussed in articles. For instance, “Tripod Hold” is the name we given to the finger placement used in Standard Grip to grasp and manipulate the top chopstick using the planetary gear principle. If you can’t see the Excel table in your browser, download the file explicitly.
Bottom Chopstick Finger Placement
Similarly, the following table shows different types of “Bottom Chopstick Finger Placement” mechanisms. Some finger placements are well-referenced in our grip analysis articles. For instance, “1-on-2 Support” is the name we gave to the finger configuration used to hold the bottom chopstick in Standard Grip. If you can’t see the Excel table in your browser, download the file explicitly.
Clamping Principles
Both tables above refer to “clamping principles”. These are ways fingers secure chopsticks. It turns out that there are not many ways for fingers to secure chopsticks. If you can’t see the Excel table in your browser, download the file explicitly.
Top Chopstick Finger Movements
We clearly separate discussions about static finger placements from dynamic finger movements. The way fingers grasp a chopstick sometimes has nothing to do with how these fingers move or roll said chopstick. For instance, Standard Grip grasps the top chopstick using a “Tridant Cantilever” placement, but it actually moves and rolls the stick using a planetary gear drive mechanism. There are a variety of ways fingers can move the top chopstick. These are described below. If you can’t see the Excel table in your browser, download the file explicitly.
Bottom Chopstick Finger Movements
There are fewer ways to move the bottom chopstick. In fact, in most chopstick grips, the bottom chopstick remains immobile. In grips that move the bottom chopstick, there are only a few practical ways to do so. They are described below. If you can’t see the Excel table in your browser, download the file explicitly.
Version History
The current version of classification is V0.03. It is crude and unfinished.
Previous versions:
- V0.03 – 2021-08-13 (current version)
- V0.02 – 2021-08-10