Last Updated on 2021 年 01 月 30 日 by 編輯
A previous article explained what the Standard Grip is. A follow-up article taught you how to wield and twirl a pair of chopsticks with the standard grip. An article will soon be published to examine the real physics of chopsticks that has eluded us since they were first used thousands of years ago. But first, let us capture the current state of chopsticks research, before the unveiling.
For hundreds of years, scientists have been describing the physics of chopsticks as a third-class Archimedean lever with a fixed-fulcrum. But that is not completely right.
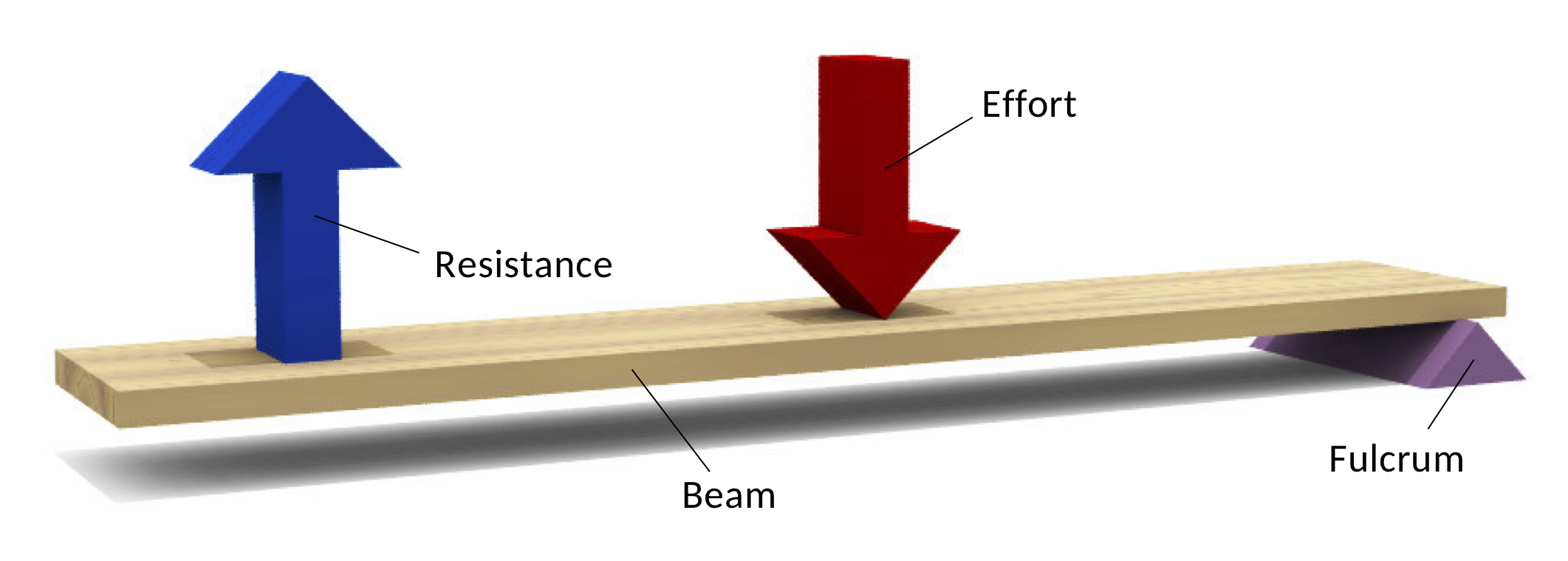
Table of Contents
Tunnel vision on lever actions
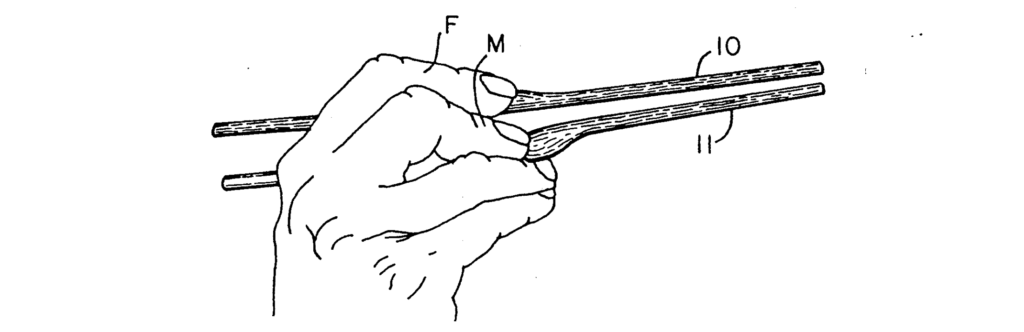
As of today (Jan 10th, 2020), searching for physics of chopsticks on Google yields almost half a million results. These include scholarly research and patent publications. All of them assume that chopsticks are a textbook example of a third-class Archimedean lever with a fixed-fulcrum. Following is a typical textbook explanation, illustrating an application of this leverage in real life. In this example, the fulcrum is placed where the thumb is. In other examples sometimes the purlicue is indicated as the fulcrum.
Almost all of prior research focus on the pinching action of chopsticks on food, incognizant of the fact that chopsticks can be made to exert significant extension forces in the opposite direction as well. Many people consider extension forces to be only useful for some specific eating situations. But the truth is that extension forces are required for all eating situations. Imagine riding a bicycle without brakes. Extension forces are the brakes. Without extension forces there will be no dexterity nor finesse.
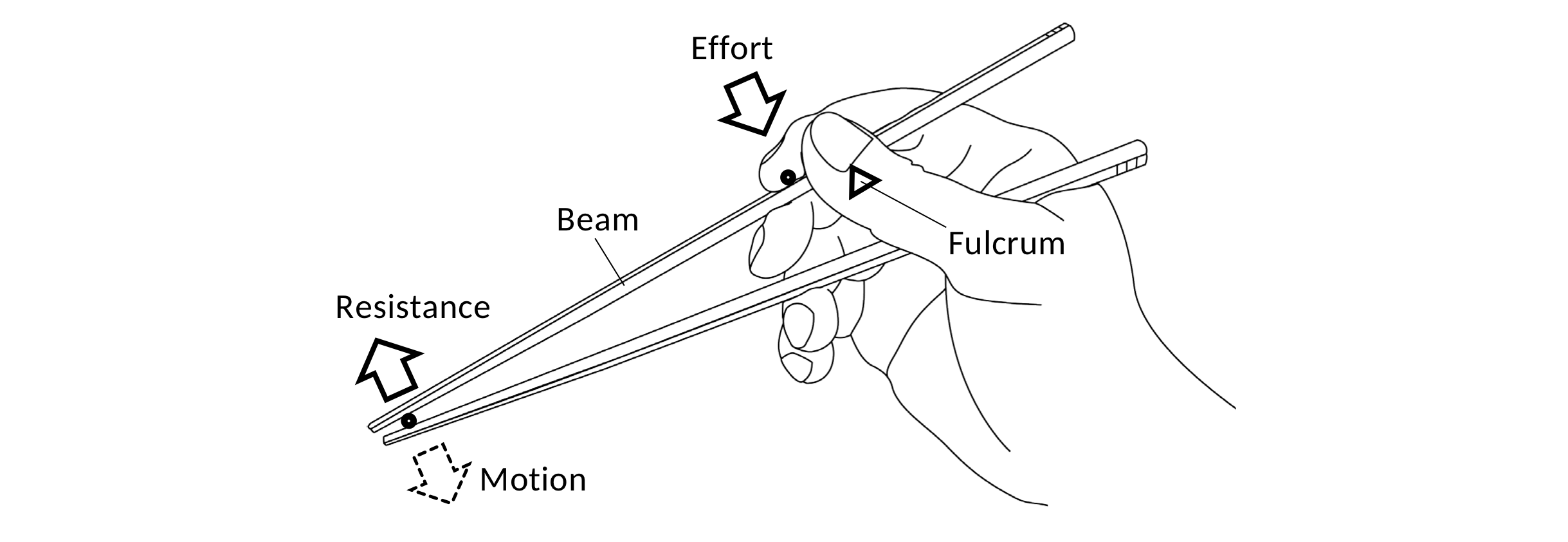
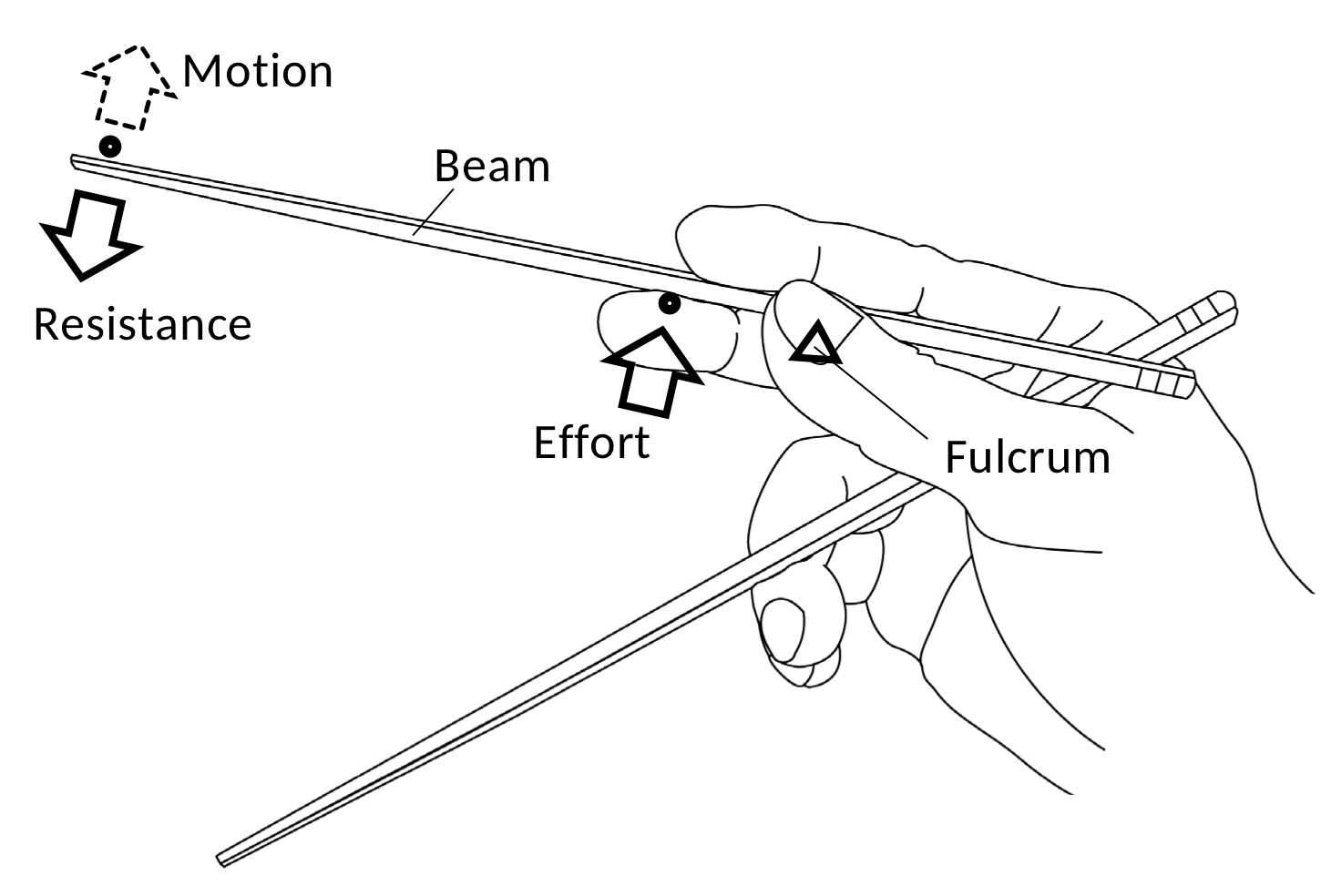
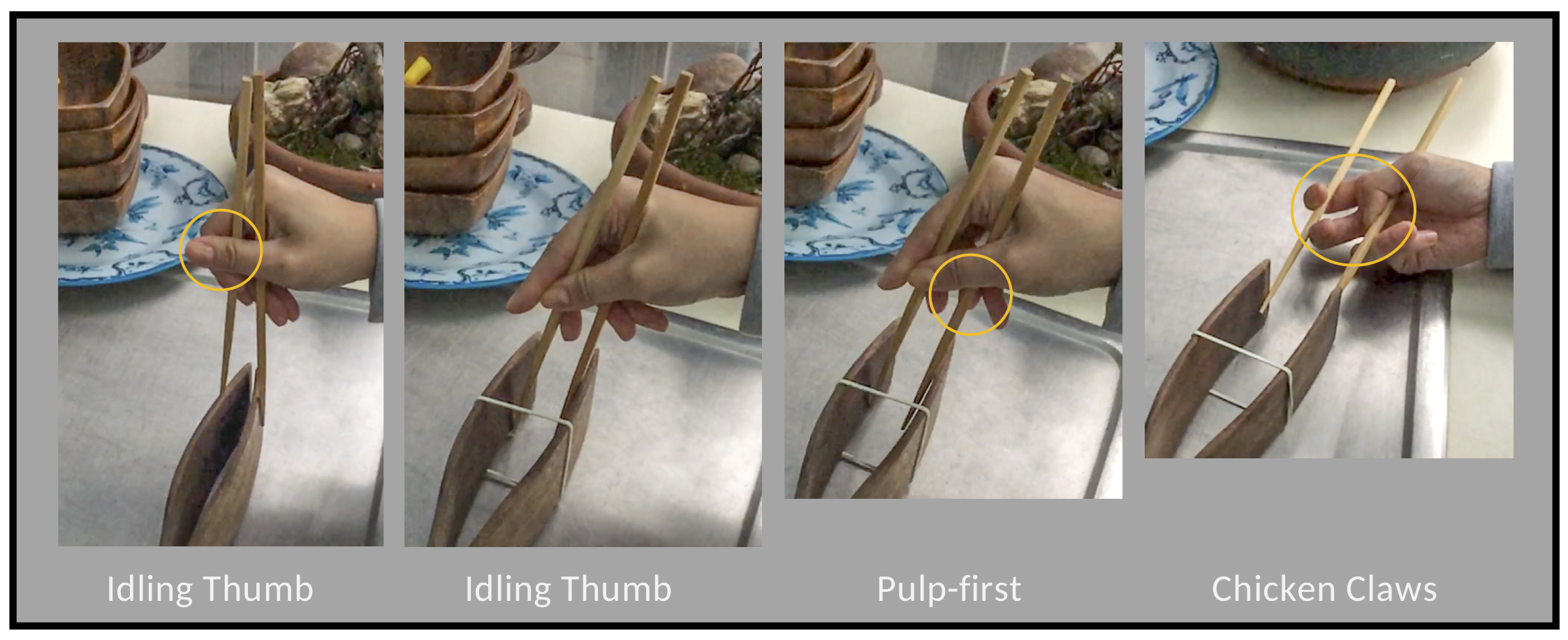
Following clip on the right illustrates that in real life chopsticks can be wielded to generate extension forces against obstacles. The drawing on the left below illustrates the perceived lever action of this extension effort.
Most of these researches do not recognize that the variety of alternative grips deserves a wide range of different mechanical explanations. A majority are unaware that chopsticks can be easily extended wide apart, even beyond an angle of 45°.
Few of them examine actual interactions between chopstick surfaces and finger skins, to understand how the long-assumed third-class lever works. After all, there are no hinges built into fingers or chopsticks. There isn’t a physical pivot on which the top chopstick sits. Exactly zero researches describe how fingers twirl both top chopstick and bottom chopstick using principles of the planetary gear train.
Myths and legends
Due to the lack of in-depth research and publications on the physics of chopsticks, myths and legends abound online.
For a starter, many authors don’t actually use chopsticks. Some wield a non-standard grip. As a result, narratives about chopstick lever actions often show different arrangements for the effort force and the fulcrum. A common mistake is to treat the rear end of the top chopstick as the fulcrum, and the thumb or the index finger as exerting the effort force. The “Machines” learning course at Fact Monster is an example.

The non-traditional “Righthand rule” grip shown in the above course does not actually work using the mechanical leverage as labeled. The thumb can’t exert downward effort against the “air” that is pushing against the rear end of the stick. Even if somehow this grip is able to produce a pinch action (compression), it is a one-way operation. Once the two sticks are closed, there is no way for the hand to separate them again, as labeled.
Another common mistake is the Vulcan Grip. Yet another common mistake is the Finger Pistol grip. This grip is prevalent in prior literature, including patent applications on correction and training chopsticks. For instance, this patent from 1994 provisions two reshaped sticks with finger grooves for easier finger placement. In this alternative grip, the pulp areas of the index finger and the middle finger are used to steady the two chopsticks. This is similar to the Vulcan Grip. They differ only in the finger used to support the bottom chopstick.
The video shown below has recorded 5 million views. It demonstrates the same Finger Pistol grip. It is true that all alternative grips are equal. And in time we will assign a name to this grip and publish detailed analysis here. But it pains us to see the community continue to muddy the water by treating all grip types as interchangeable, and all grip types as using a third-class lever. For instance, where is the fulcrum in the video below, and which part of the hand is acting like said fulcrum, when opening and when closing the tips of the these chopsticks?
Why can’t the thumb act like a fulcrum?
The myth that the thumb acts like a fulcrum persists despite visually-confirmable facts to the contrary. One reason is because researchers tend to focus only on the pinching action, shown below on the left. It is tempting to draw “obvious” conclusions from a mere picture, and infer how the finger dynamics “must” work. Following this train of thought, “obviously”, the index finger generates a presumed “effort” force downward. “Obviously”, the tip segment of the thumb acts as a presumed fulcrum, pushing upward against said presumed effort.
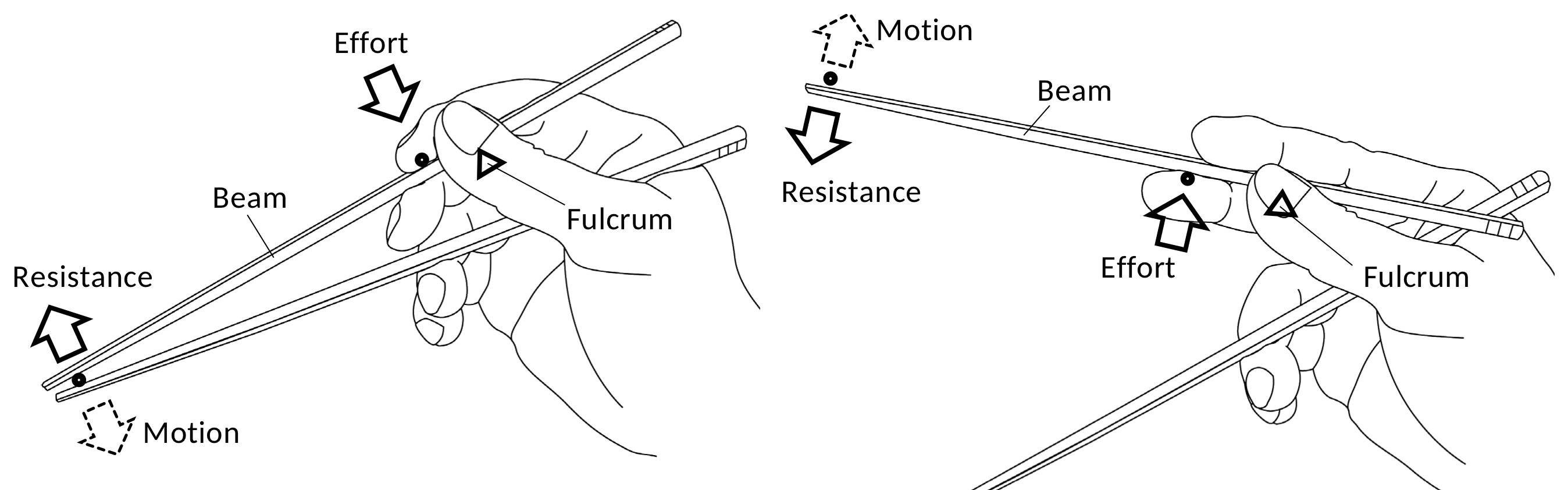
The counterpart to the pinching movement is unfortunately often ignored, shown above to the right. This counter movement extends tips of the two chopsticks apart, so that the cycle of pinching and extension can continue. The two movements together is referred to as the alternating motion, as explained in depth in the learn to twirl chopsticks article.
When one considers the pinching movement shown above, next to the extension movement, then this fulcrum narrative starts to fall apart. Recall that the “fulcrum” exists for a reason. It supports the beam (top chopstick). In a third-class lever arrangement, it effectively provides a counterforce in an opposite direction to that of the “effort” force. How is the same thumb supposed to be able to provide an upward counterforce in the pinching movement, and then a downward counterforce in the extension movement?
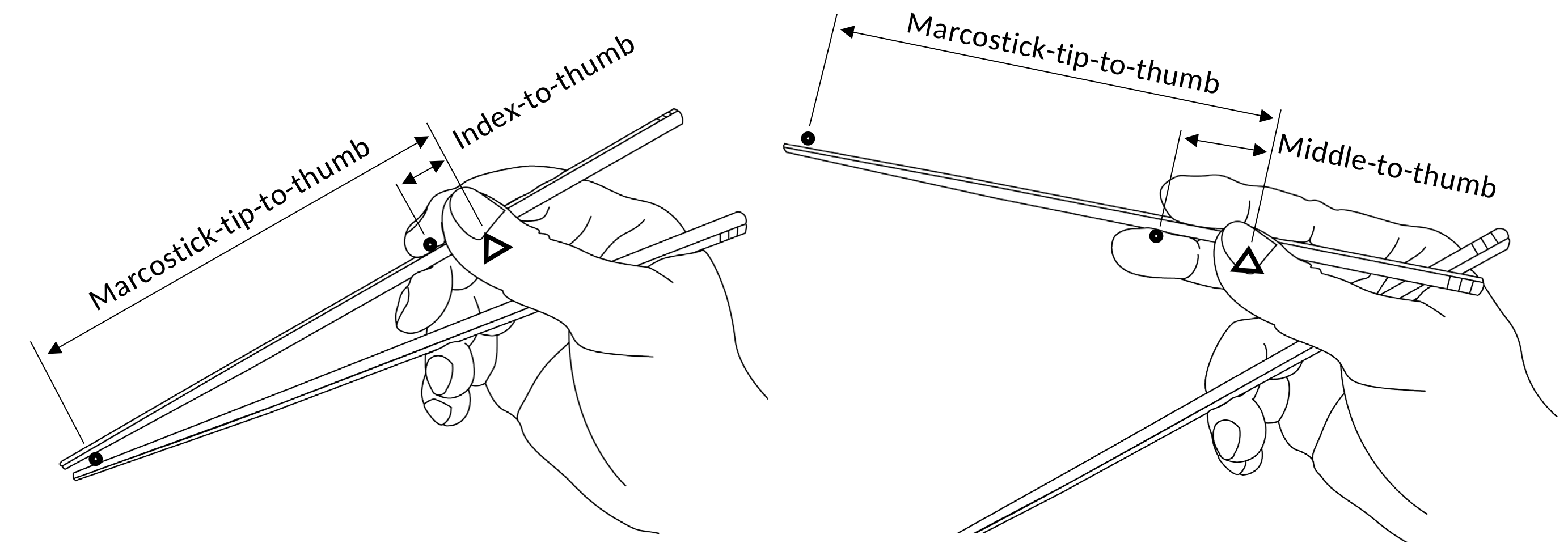
Also, note how close the index finger is to the thumb. If this were just a third-class lever, the stick would not be able to generate much compression force, due to the index-to-thumb distance being about 1/8 of the chopstick-tip-to-thumb distance. Similarly, the middle finger is also close to the thumb, at probably 1/5 of the chopstick-tip-to-thumb distance. So the leverage ratio is only 1/8 for pinching, and 1/5 for extension.
The discussion on leverage ratios assumes that the thumb can even act as a proper fulcrum. It cannot. The thumb presses against the chopstick from the side, not from the bottom as required of a fulcrum for the pinching movement, nor from the top as required of a fulcrum for the extension movement.
Clever readers may beg to differ. The thinking goes likes this. Just have the thumb push hard on the chopstick from one side, against the index finger on the other side. This turns the stick into an extension of the index finger. When the index finger bends inward, the stick will be forced to move downward, as an extension of it. We encourage those readers to try this with real chopsticks, and re-evaluate such thoughts. With this arrangement, tremendous sideway forces are now required of the thumb and the index finger to keep the chopstick from slipping. Cramping ensues. In any case, this is no longer a third-class lever, but mechanical clamping.
Planetary gear train
To generate enough leverage at a 1/8 ratio for the pinching movement, large “effort” force is required in reality. But the biggest problem is the lack of a physical fulcrum point to provide upward and downward counterforces. This issue is like the elephant in the room. Everyone recognizes it, in the back of their head, that there is something fishy here. But no one wants to look closer, lest they open a can of worms.
Let’s look at a slow motion video of three fingers twirling the top chopstick, using the Standard Grip. Examine each of the three fingers involved in this alternating motion. Study movements of the stick. Track not only the evident up-down motion, but also the less noticeable “roll” it makes. This rolling movement can be identified by the changing “faces” of the stick that come into view, at the two ends of the large up-down motion. Also, pay special attention to how the stick rolls against finger skins throughout this alternating motion.
We should stop pretending that we are looking at a video clip of a third-class Archimedean lever. If we instead examine the various mechanisms involved, then it becomes obvious what is really happening. We are looking at three fingers twirling the stick, like planet gears rotate a sun gear in a planetary gear train. This is also known as an epicyclic gear train. Here is a video illustrating how the epicyclic gear train works.
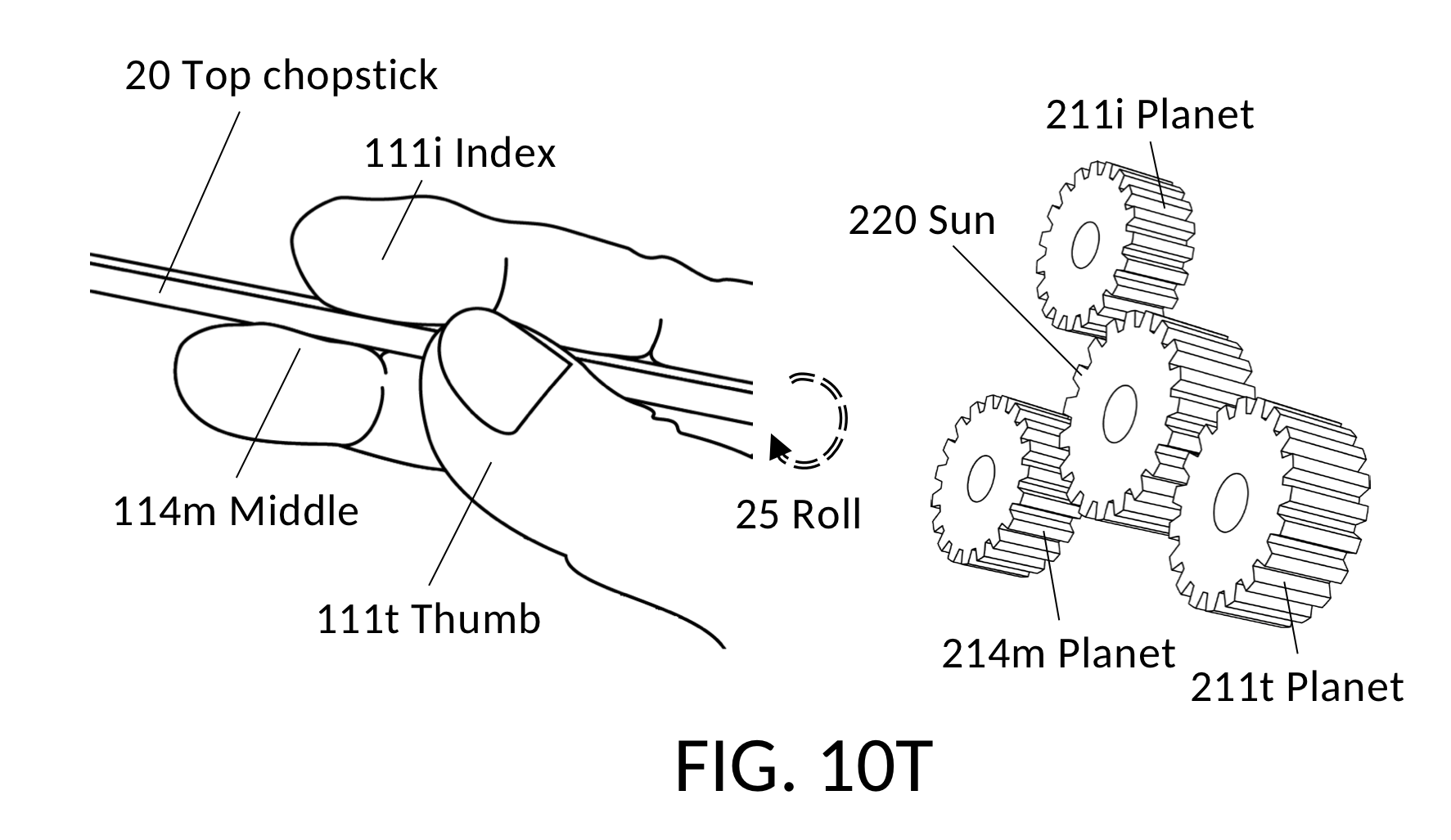
Don’t let the overall up and down motion of the chopstick in the video distract you. The index finger and the middle finger make an “air quote” gesture which also dominate the short repeating clip. If you momentarily discount the large stick motion and the “air quote” gesture, you will discover how the stick rolls against skin of all three fingers throughout the motion.
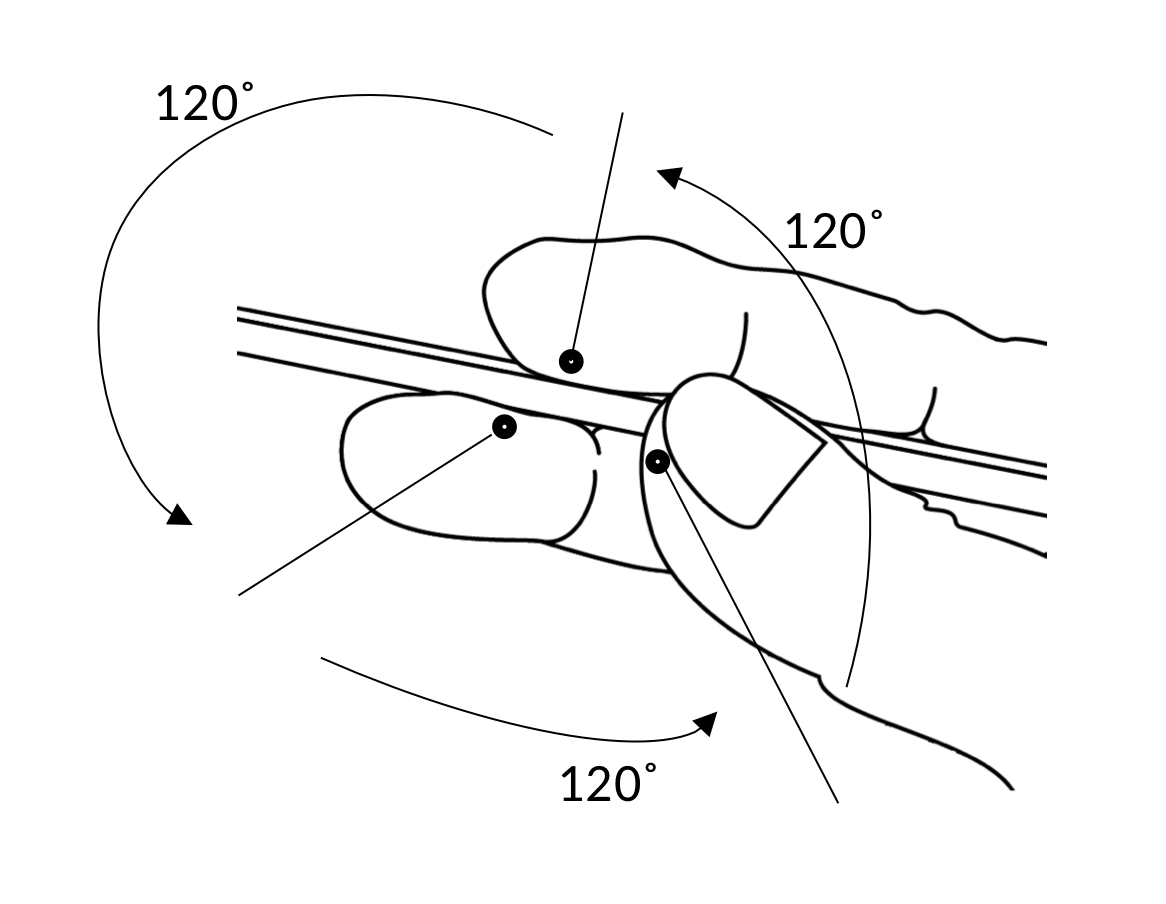
The secret of an agile and powerful standard grip lies with what we call a “tripod hold”, depicted in the drawing above. A strong grip utilizes all three fingers, at the 3 points illustrated in the drawing. This enables a user to exert tremendous compression and extension power at the tips of chopsticks, even at leverage ratios of 1/5 (middle-to-thumb) and 1/8 (index-to-thumb). The power is not generated by a third-class lever, but by the twisting/rolling action of a planetary gear train, aided by the “air quote” gesture.
The article Learn to Use Chopsticks explains how one can better learn to wield the standard grip, using this newfound knowledge. A follow-up article on the Physics or Chopsticks vies deeper into this mechanism, with much greater details: Planetary Gears and Chopsticks.
For now, let’s review some past research and publications, in hindsight of this discovery.
Drum sticks and marimba mallets
The twirling of chopsticks is not unlike a better-studied skill – drum stick twirling. Here is a video of an expert drummer twirling a drum stick, in slow motion.
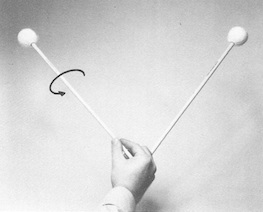
There is an even better and more appropriate analogy. A marimba player often holds two mallets in each of the two hands. Each hand must open and close two mallets by itself. Here is a video showing how a player wields a total of four mallets in two hands.
Written materials on chopstick twirling is lamentably lacking in both depth and breadth, compared to published literature on mallet wielding. To wit, there is a whole book online on the mechanical principles of good mallet technique. Even with this whole book written, its author still apologizes for not covering enough styles of mallet wielding. The author regretfully admits to the lack of coverage in topics such as the mechanics of pressure strokes, one-handed baroque ornamentation, independent rolls, and any other sustaining techniques are not covered.
On the other hand, there are exactly zero books on the mechanical principles of good chopstick technique.
Similarities between mallet wielding and chopstick twirling are apparent, when one reads this mallet technique book, in light of the previous section on planetary gear train. Chapter VII “Interval Changes” even makes this astute comment on how a mallet rolls between the thumb and the index finger, short of calling this mechanism an planetary gear train with two planet gears:
The inside mallet will spin slightly between the thumb and the first finger as the interval changes. When the interval is opening, the mallet in the right hand will spin counterclockwise; the mallet in the left hand will spin clock wise. The direction of spin will be opposite when the interval is closing. See figure 8.
Leigh Howard Stevens – Chapter VII “Interval Changes, Method of Movement
Current state of chopstick scholarship
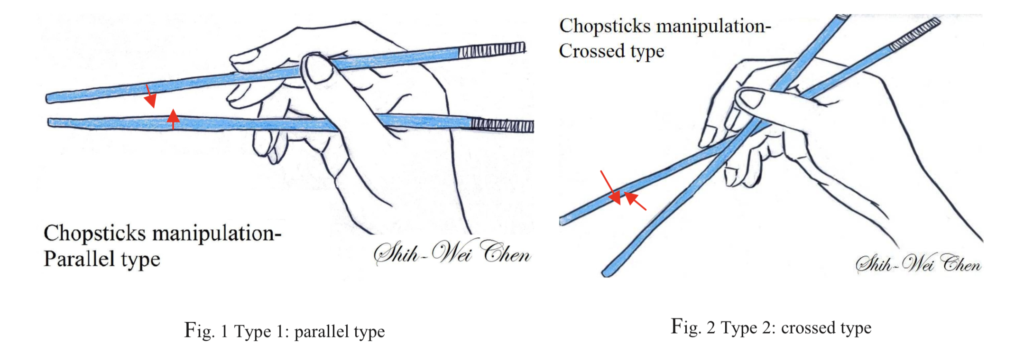
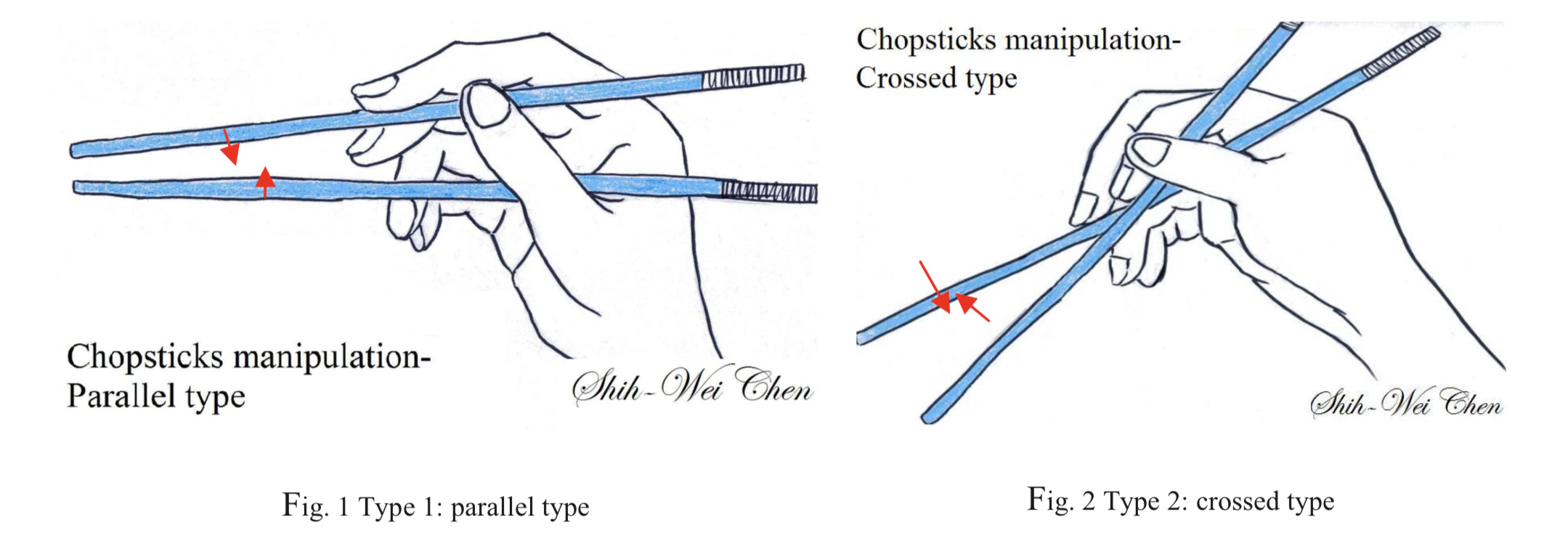
We now turn back to the current state of chopstick research. We mentioned that plenty of search results are returned when one searches for physics of chopsticks on google.com (Jan 10th, 2020). The second top result returned by Google typifies how scholarly research on chopstick is conducted today. The search result points to a paper by Chen S.W. et al., titled “Kinematics Analysis of Chopsticks Manipulation“, published in World Congress on Medical Physics and Biomedical Engineering in 2009. The abstract starts with:
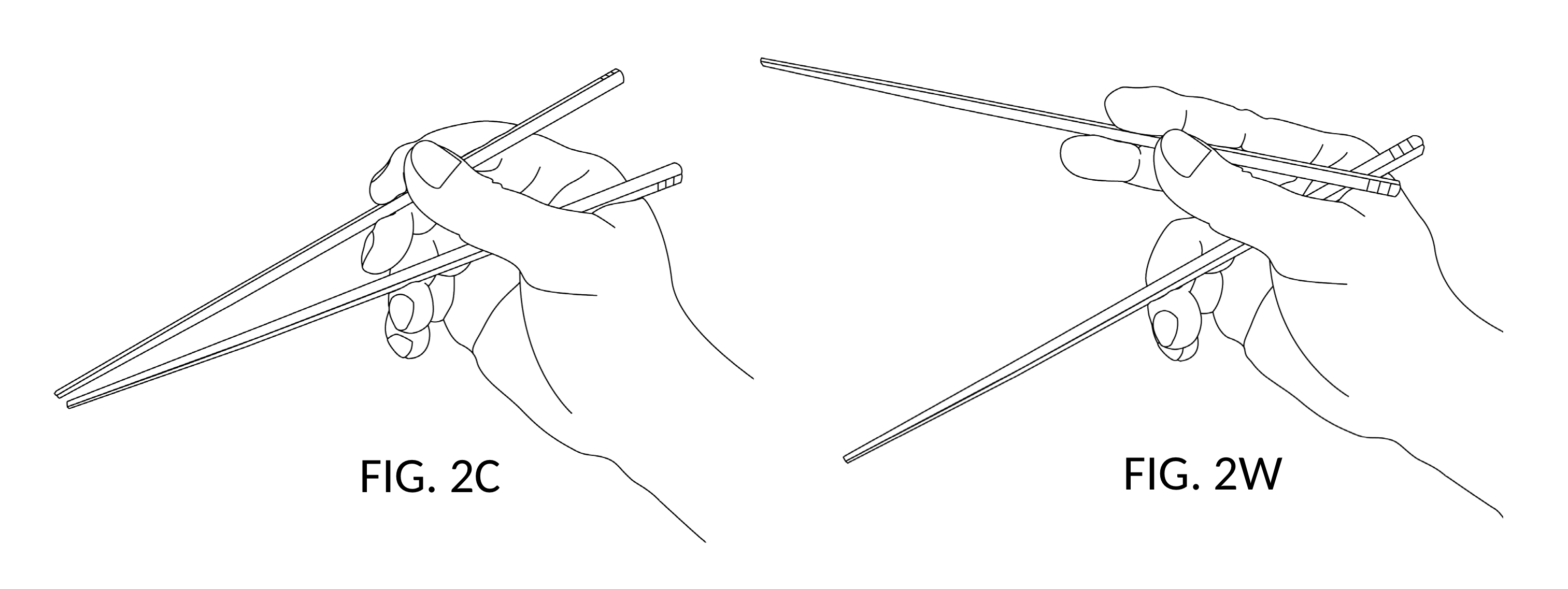
… Two main postures can be identified. One is parallel type, the other is crossed type. The purpose of this study is to compare the kinematics performance in these two holding postures, furthermore, to find out the reasons why the parallel type seems to be more effortless than the crossed type.
The researchers have declared an artificial dichotomy of grip types: the parallel type vs. the crossed type. This is not a useful dichotomy.
At marcosticks.org, we have conducted extensive field observations at ethnic restaurants. We find that a great majority of lifelong chopstick users actually use non-standard grips. Many alternative grips look at a first glance like the standard, “parallel type” shown above to the left. Many alternative grips look like the “crossed type” shown above to the right.
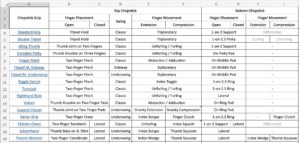
Of all grip types that resemble the so-called “parallel type”, we have already published, at the writing of this article, five variations here: Standard Grip, Vulcan Grip, Weak Standard Grip, Idling Thumb, and Chicken Claws. Another half a dozen variations are being written based on recorded and analyzed videos. These will be published and added to the family tree, before we publish more recorded variants of the so-called “crossed type” such as the Scissorhand grip. (Update 2021: we have now published more than 18 grips, including additional “perceived” cross types such as Cupped Vulcan and Dangling Stick)
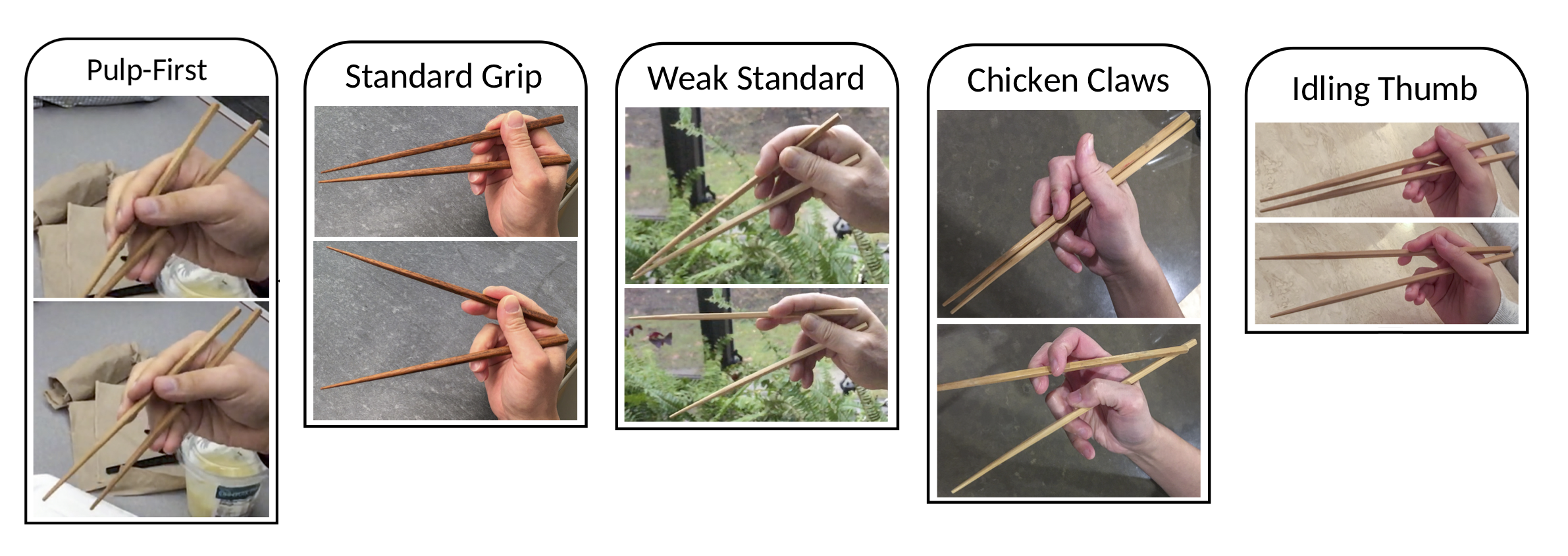
Despite the fact that all five variations shown above start off in a parallel-stick state, these variations all command very different finger dynamics and mechanical advantages. The two artificial groups cannot be treated as containing homogeneous members within each group. Doing so results in vague and ambiguous conclusions, as is the case for this research:
The results in significance showed that the chopsticks angle was greater in crossed group than in parallel group. Besides, in comparing with crossed group, participants in parallel type seemed to change their movement pattern more often or with more variability.
Based on our field observations, we do not conclude that the crossed-type enables a greater extension angle. The video clip from earlier, showing Standard Grip extending chopsticks for greater than 45°, should already serve as an anecdotal evidence to the contrary. But perhaps the researchers were merely stating that, out of a candidate pool of 11 participants, the 6 parallel-type users on average demonstrated smaller extension angle, compared to the 5 crossed-type users. In any case, it is not clear to us what applications one can derive, from such conclusions. After all, the article on Weak Standard Grip shows that greater extension angles are not useful in real life eating situations, if they do not come with comparable compression force and extension force.
This research concludes that 6 parallel-type users appear to show a large variety of finger movement patterns, and that some of these users appear to change their movement patterns from time to time.
Recall that we have already published 5 out of a dozen alternative grips we have recorded and analyzed, just within the so-called parallel group. Thus, it is no surprise that 6 parallel-type users exhibit a range of different finger movements. In the Weak Standard Grip article, we showed that when under load, users of this grip tended to switch to other alternative grips, in an attempt to compensate for the lack of thumb engagement. That explains the change of movement patterns.
So what exactly did the researchers study?
Eleven participants were recruited in this study. Six were parallel type, and the others were crossed type. They were asked to manipulate chopsticks in upper and lower positions. The kinematics parameters, including the finger joint flexion-extension angle, the digit-to-digit abduction angle, the finger relative flexion-extension angle, the wrist joint flexion-extension angle as well as radial-ulnar deviation angle, the chopsticks angle, the chopsticks tip distance and the velocity of approaching movement were measured. Whole duration was divided by four time points for a clear comparison.
These are all fine measures to take. But we cannot draw useful conclusions from these measures of just two groups, when there are dozens of variations of each of type. Comparing extension angles, speed and acceleration of two artificially-defined groups does not yield clear insights, when there are possibly more important variables beside the one variable used in this research, the parallel vs. crossed difference. For instance, mechanical advantages differ between variants of the parallel type. Some variants of the parallel type have mechanical advantages closer to some variants of the crossed type, rather than other variants of the parallel type. Besides, two of the most important measures of the efficiency of a grip type are missing from this experiment: the compression force and the extension force generated by the sticks.
Looking at how the researchers arrive at some conclusions from observations, we have the following:
In clinical observation, two main hand holding postures are noticed. Firstly, two chopsticks are hold in a parallel direction [Fig. 1]. The other is that two chopsticks are hold in a crossed direction [Fig. 2]…. According to Figure 1, the fulcrum could be inferred to thumb pad which is contact to the upper chopstick. The effort force is the position which is pressed by index and middle finger. Both of the load forces are presented at the tip position of chopsticks which will help to hold the food. Hence, it can be simply concluded that both postures are the third type lever.
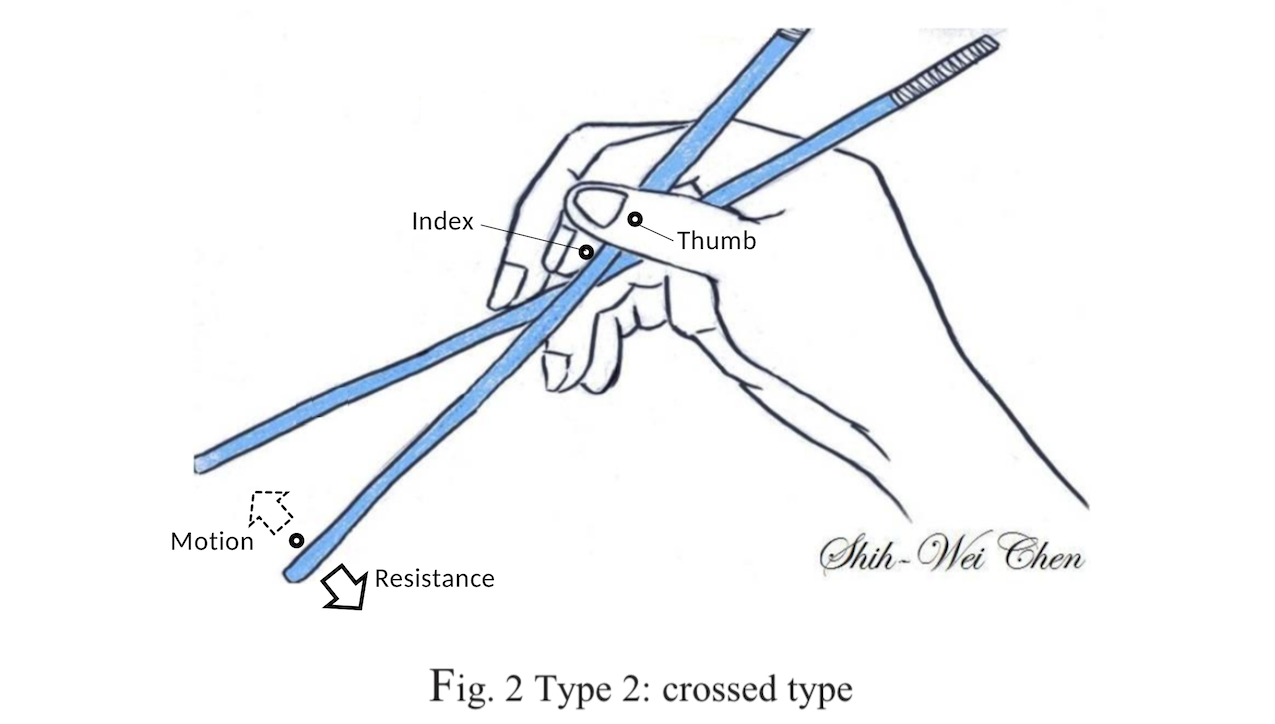
The researchers “inferred” that both postures, parallel type (Figure 1) and crossed type (Figure 2), use third-class lever as mechanical advantage, based simply on the observation that the thumb pad is at the location of the fulcrum, and that the index finger and middle finger can exert “effort” forces in Figure 1. This visual inference may hypothetically make sense for the parallel type in Figure 1. But even a quick visual examination of Figure 2 confirms that some mechanism other than the third-class lever must be behind the particular variation of the crossed type shown. Thumb, Index, Motion and Resistance annotations in the figure below are ours.
We won’t dwell on this particular issue. It will be addressed in time, in future articles on additional crossed-type grips such as Scissorhand. Based on our own research, we now deem the crossed vs. parallel argument a misleading and simplistic classification. It is more useful to understand types of grips based on Classic Swing and its two common variants we propose: Under Swing and Sideway Swing. See the article Out with the Crossed Type, In with the Under Swing for details.
Update 2021: We have now published more examples of under-swing variants: Cupped Vulcan and Italian Grip. We have also published more articles on individual factors that can be used to compare chopstick grips, such as the article on: Using vs not using the Thumb.
Looking forward
The next article will examine the recent history of chopstick inventions. This will cover publicly-available patents and patent publications from several countries, in the last 30 years. It will serve as a confirmation of the general lack of research into the physics of chopsticks.
By this we do not mean that there was a lack of patent applications on chopsticks. On the contrary, plenty of patent applications on correction and learning chopsticks were filed. Many were granted. But none of them showed a deep understanding of how chopsticks work, beyond the long-presumed, third-class lever action. This results in learning chopsticks on the market that do not work. This article documents both those learning chopsticks, and our newly-designed training marcosticks: Best Learning Chopsticks.
Finally, after the inventions article, we dove deeper into the real physics of chopsticks, beyond the basics mentioned here. That article can be found here: Planetary Gears and Chopsticks.
Cheers.
#HistoryOfMarcostickResearch