Last Updated on 2022 年 01 月 30 日 by 編輯
Before the advent of marcosticks.org, the world described chopsticks as operating using a third-class Archimedean lever configuration with a fixed fulcrum. But the reality is more nuanced. It turns out that the planetary gear train, also known as epicyclic gears, is a key driver that makes the Standard Grip motion possible. Watch this short video where we introduce the physics of chopsticks:
Alternatively, observe the following slow-motion capture of the top chopstick being manipulated using the standard grip. Pay attention to the top stick. Does the chopstick motion look like that of a a third-class lever with a fixed fulcrum, on single plane of rotation?
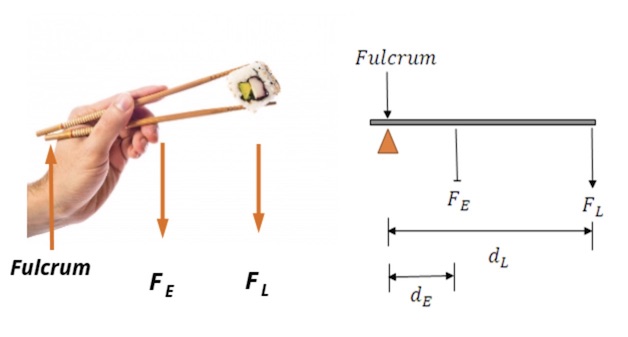
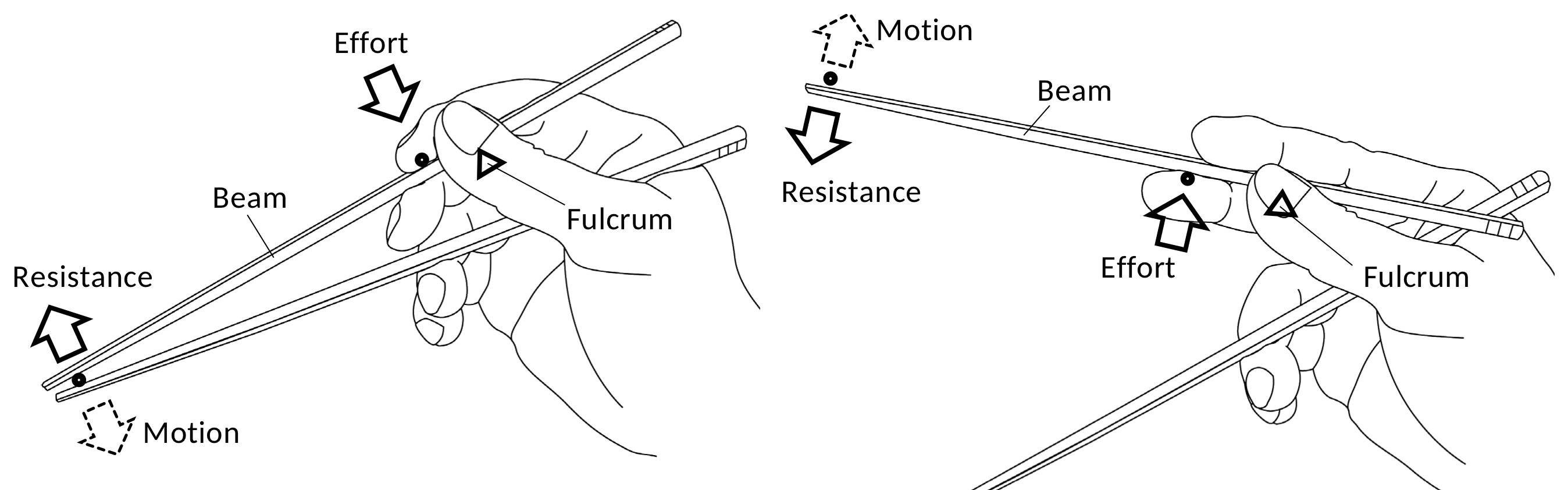
At a glance, the motion may resemble that of a third-class lever, as shown below. But the story is more nuanced than just that.

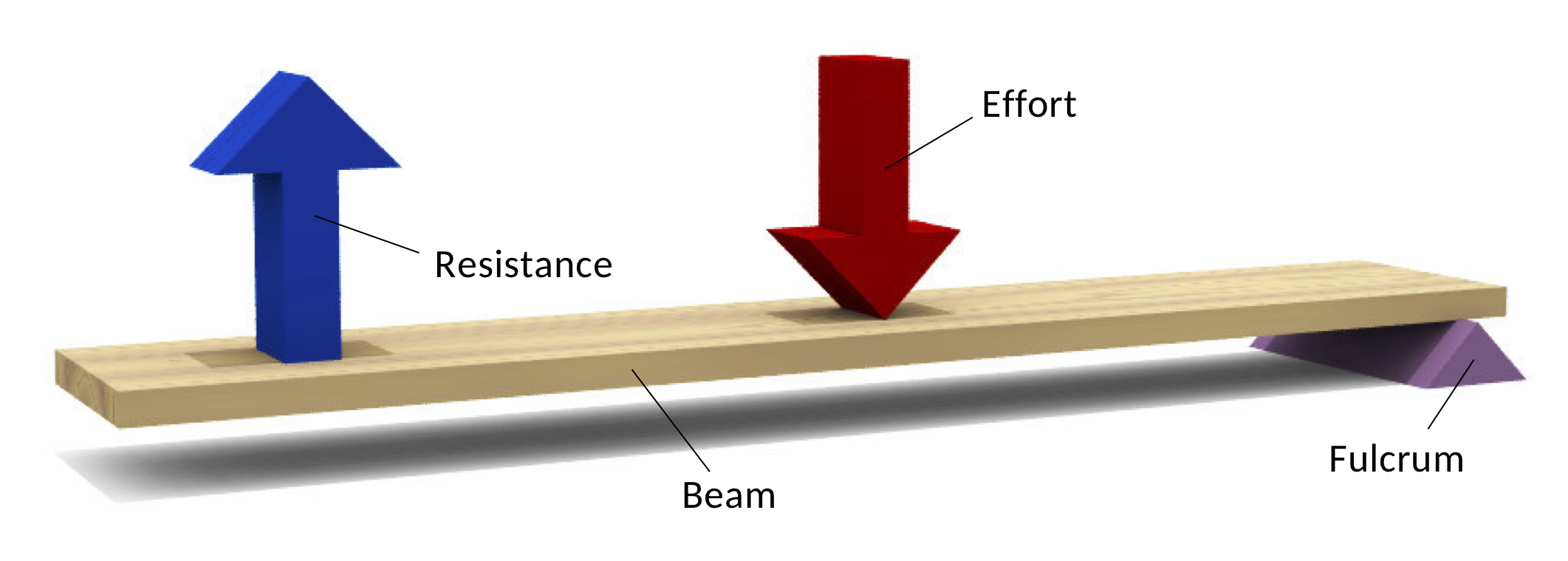
Table of Contents
Tripod hold and Standard Grip motion
Note how the index finger and the middle finger almost cage the top stick between them, turning the stick into an extension of these two fingers. The thumb tip pushes on the same top stick against the two fingers, to complete the sandwiching effort. We call this three-finger grip, the “tripod hold”.
In order to close tips of the two sticks, the two fingers make an “air quote” gesture, bringing the top stick downward.

The next video is an exaggeration of this air quote, to demonstrate the combined effects of the air quote and the tripod hold. Combining these two in a human hand results in the stick being rolled around its longitudinal axis, by the tip of the thumb and the index finger. We call this the “Standard Grip motion”.
The next video is an even more exaggerated version of the same. The tripod hold twirls the top stick as if it were a pen. The key observation to make here, is that skin of fingers meshes with the surface of the stick, as if both skin and stick surface sported gear teeth. The 90° edge of square chopstick is especially useful for this purpose.

Planetary gears
We now understand that the top chopstick is not just a simple lever. What you have observed is in fact known as a planetary gear train in mechanical engineering. See the illustration shown below, for how the three fingers map to planet gears.
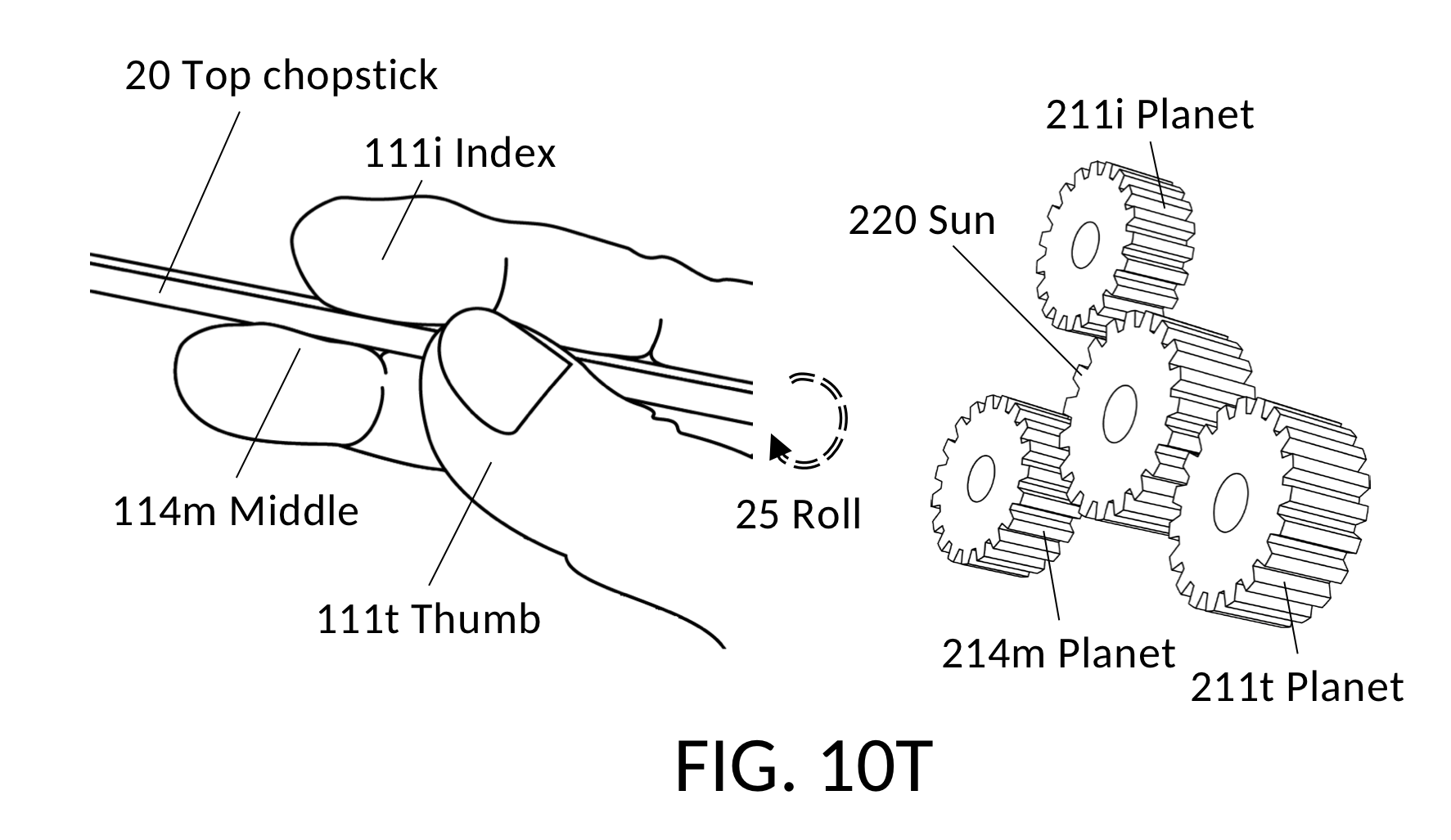

The anatomy of the human hand and fingers is such that when a chopstick is placed between the tip of the index finger, and the distal knuckle of the middle finger, an air-quote gesture acts as a virtual ring gear to synchronize rolls of the three fingers.

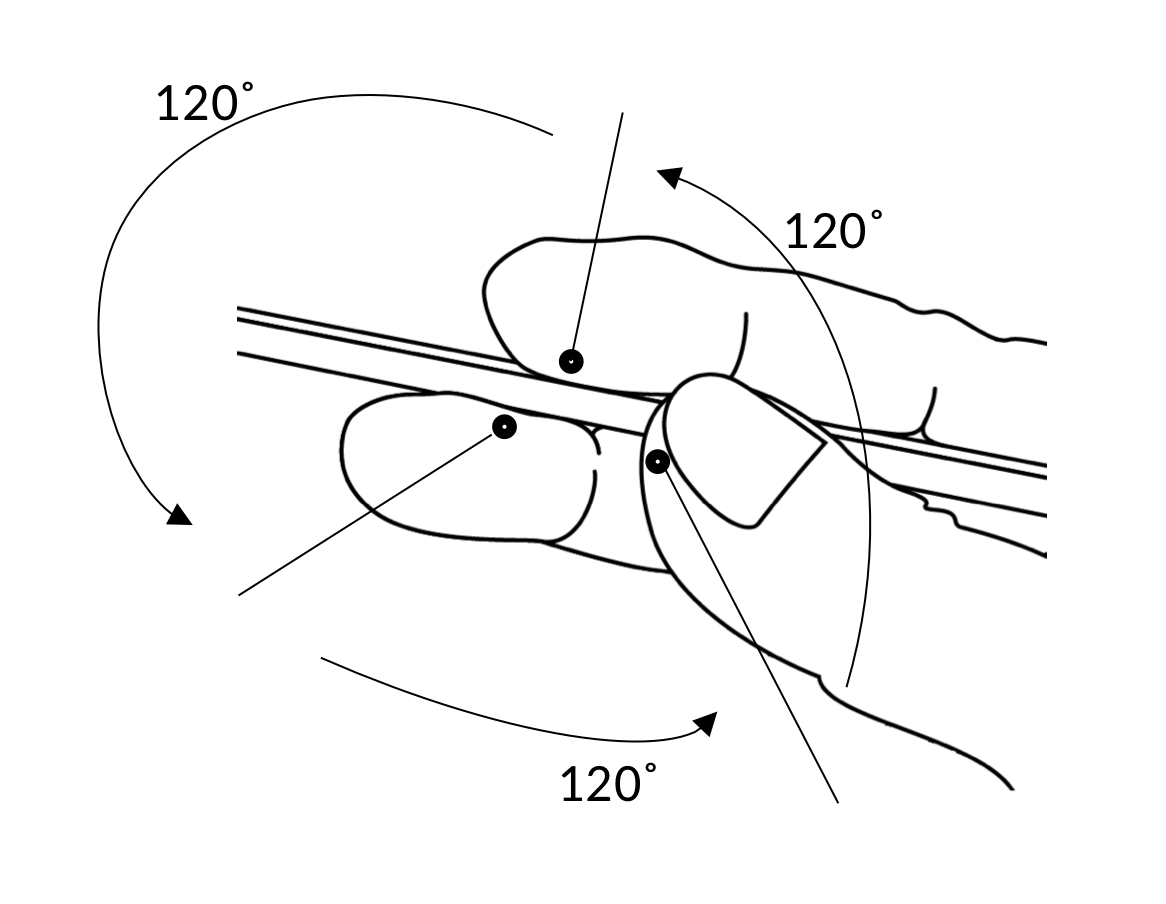
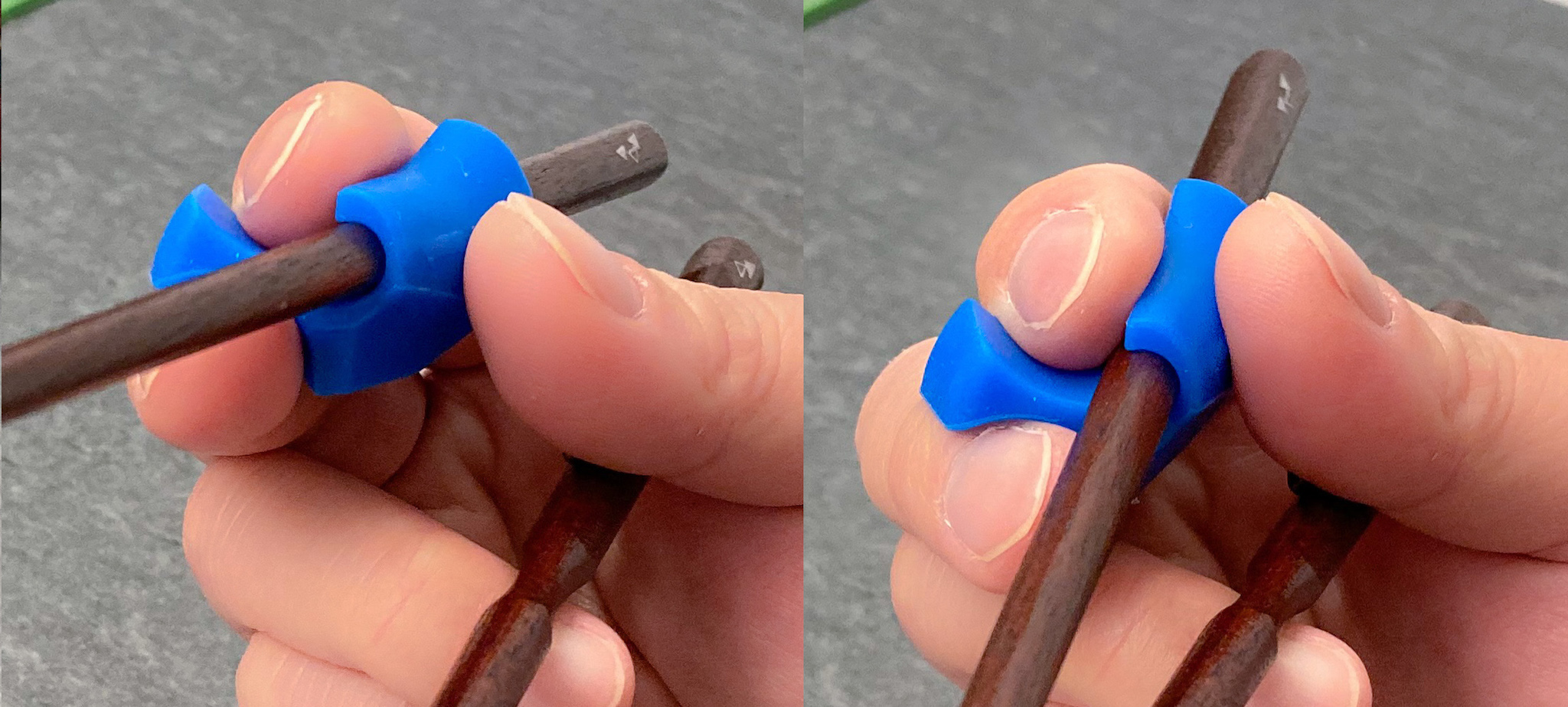
Following are close-up pictures of the tripod hold doing its planetary gears work. Compare the tip of the thumb in the closed posture on the left, to the open posture on the right. Note how the thumb tip appears to “move” across the surface of the stick. But it doesn’t “move” in the sense that it scrapes the surface of the stick. Instead, the skin of the thumb “meshes” with the surface of the stick, just like gears mesh by teeth. By meshing and locking onto stick surface, the thumb tip is able to roll the stick for 90°, around the longitudinal axis of the stick. This 90° rolls can be clearly seen in these two pictures.
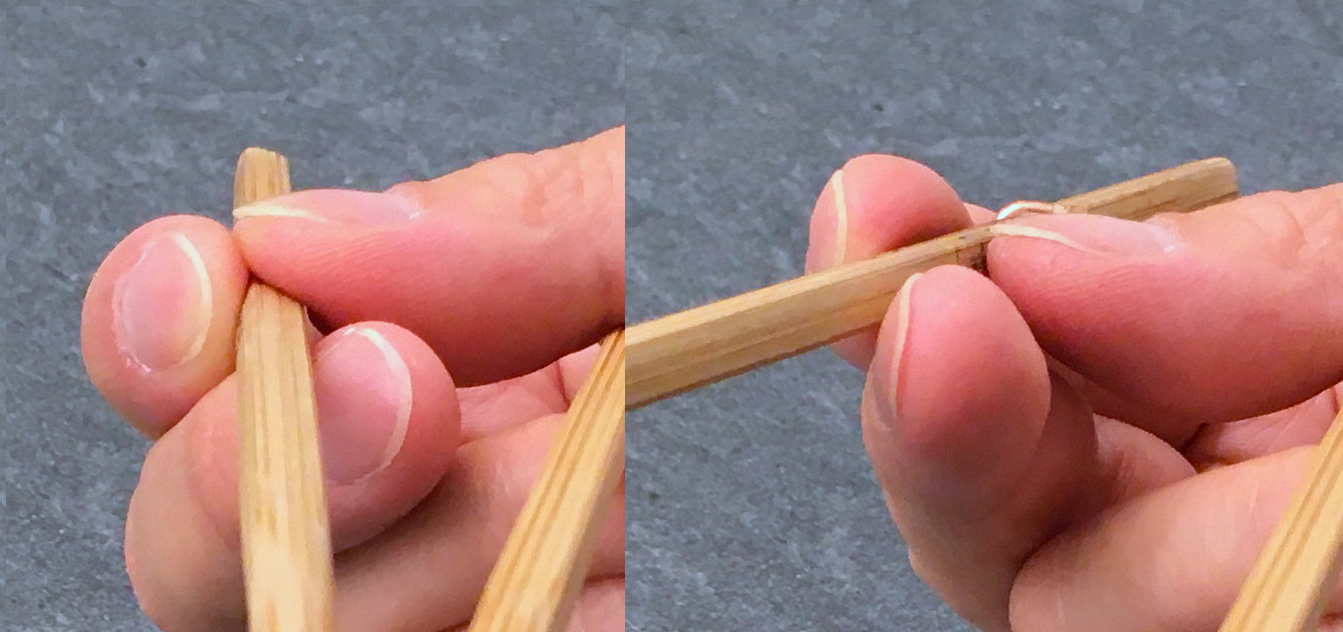
Also note how the index finger similarly meshes with stick surface. Thus the index finger seemingly “moves” across stick surface. But in fact it rolls the stick as if both were gears.
The article Learn to Use Chopsticks goes into additional details on the planetary gears, and how it drives the Standard Grip finger motion. We first made this observation, and documented it in our first patent application on ergonomic chopsticks. The patent has now been issued by USPTO as US11213149B2. We have edited our application for our web audience: Ergonomic chopsticks – US20210059445A1. It has the most detailed explanation on the physics of chopsticks.
Top stick as a lever on a fulcrum
Previous literatures usually classified as 3rd class levers. Numerous chopstick inventions treated the top stick as pivoting on a hinge, based on this principle, as shown below. Given what you have just learned earlier, these are not complete characterization of chopstick physics.
Textbooks use chopsticks as exemplar third-class levers. One such illustration is shown below. This particular illustration is actually showing the Righthand Rule grip, not Standard Grip. But that is a minor issue. One key misunderstanding from the past is that a fulcrum even exists at the rear end of either stick, in this example.
If the rear end of a stick is not the fulcrum, then where is the fulcrum?
Many scholarly research and patent publications assume that the thumb is used as a fixed pivot, where the top stick tilts in a fixed rotational plane, as illustrated below.
Incomplete view of chopstick physics
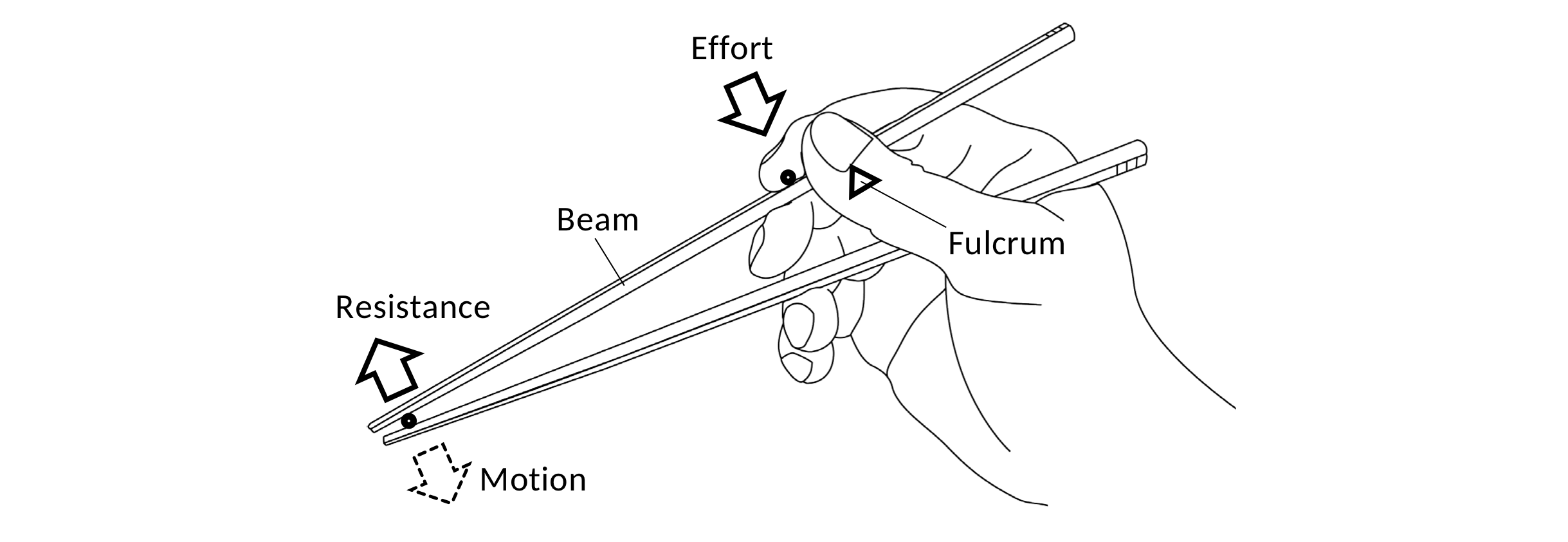
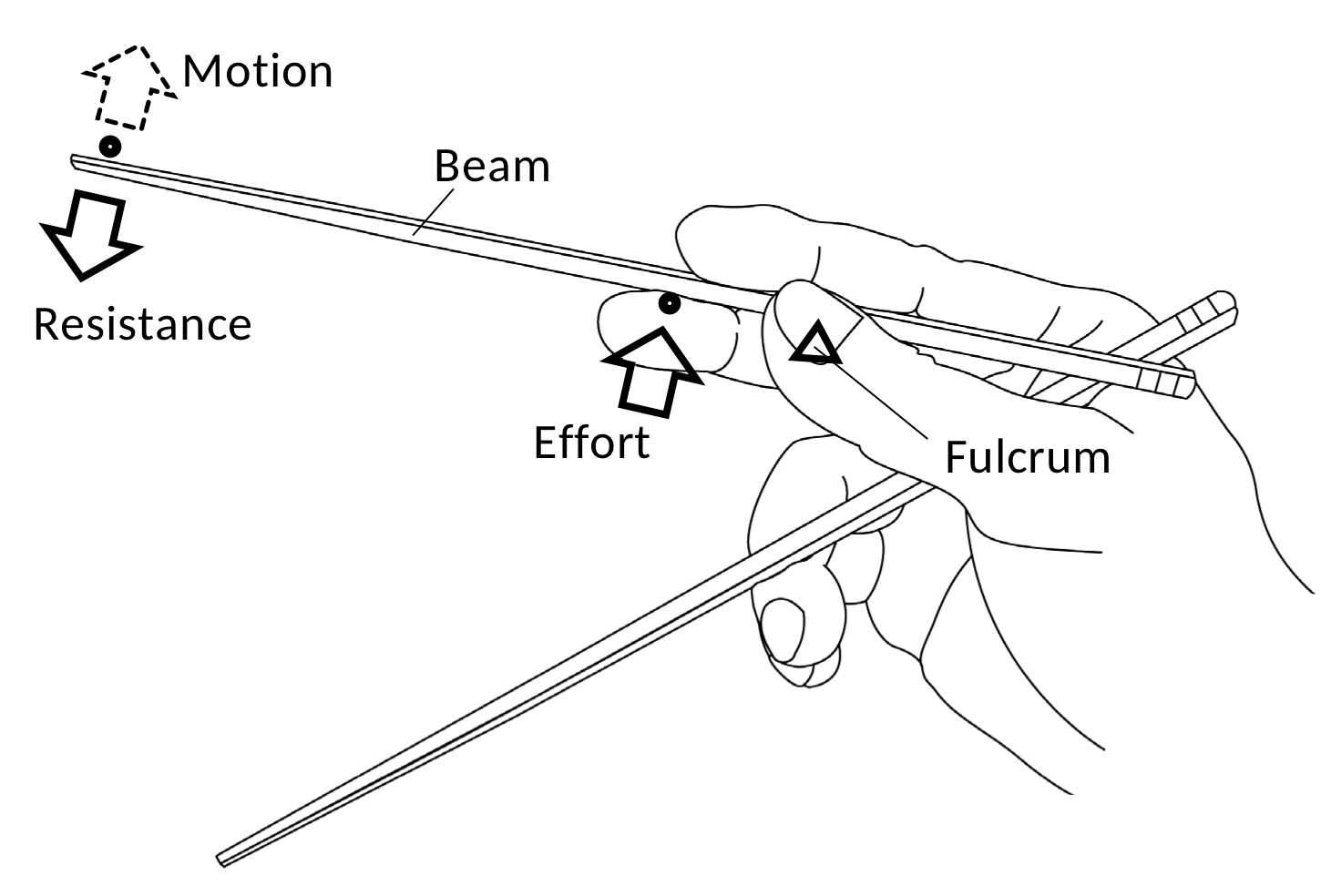
Almost all of prior research focus on the pinching action of chopsticks on food, incognizant of the fact that chopsticks can be made to exert significant extension forces in the opposite direction as well. The video clip on the right below illustrates how chopsticks can be wielded to generate extension forces against obstacles. The drawing on the left below illustrates one perceived lever action of this extension effort.
When one considers the pinching movement from earlier, next to the extension movement here, then the fulcrum narrative starts to fall apart. Recall that the “fulcrum” exists for a reason. It supports the beam (top chopstick). In a third-class lever arrangement, it effectively provides a counterforce in an opposite direction to that of the “effort” force.
How is the same thumb supposed to be able to provide an upward counterforce in the pinching movement, and then a downward counterforce in the extension movement?
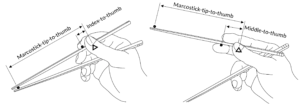
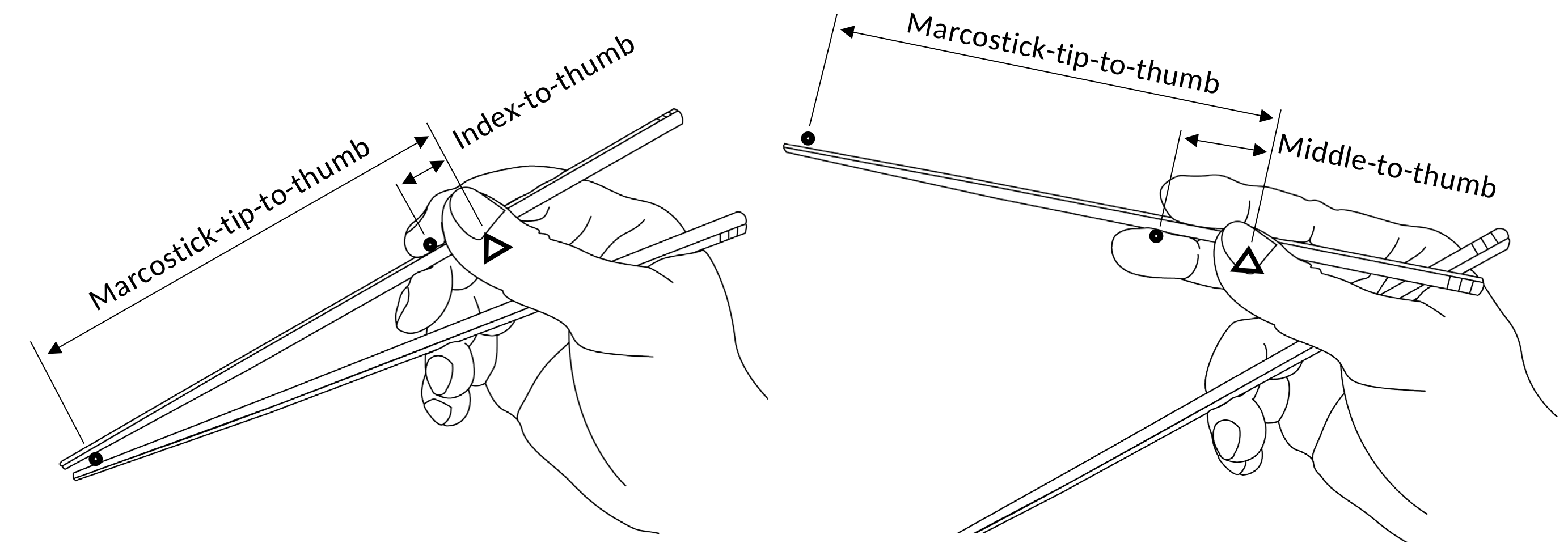
Also, note how close the index finger is to the thumb. If this were just a third-class lever, the stick would not be able to generate much compression force, due to the index-to-thumb distance being about 1/8 of the chopstick-tip-to-thumb distance. Similarly, the middle finger is also close to the thumb, at probably 1/5 of the chopstick-tip-to-thumb distance. So the leverage ratio is only 1/8 for pinching, and 1/5 for extension.
A better explanation
In the History of Chopstick Research article, we went into more details on this dilemma, and its solution. But you have read thus far, and you can probably anticipate the solution already. The rolling of the top stick by the tripod hold, together with the air quote gesture, is the key to understanding the physics of chopsticks.
We don’t pretend to know the actual kinematics behind this observed planetary gear motion. But we do have some suggestions about how to explain it. Hopefully real mechanical engineers can soon help us parse the math behind it.
Stick as extension of tripod hold
First, the perceived leverage issue is not real. Look at the power the Standard Grip generates in following video clips. These are what we call the “litmus tests” of chopstick grips. We use them to measure relative effectiveness of different grip types.


A pair of salad tongs are bound by a rubber band. The tail is bound for the compression test shown above left, where chopsticks force tongs to close. The tongs themselves are bound for the extension test shown above right, where chopsticks pry them open. We find that the best way to discern how a grip works, is to subject it to strenuous tests like this one.
Significant forces need to be generated for both tests. If you watch these clips a few times, you will agree with us that the top chopstick looks co-opted by the tripod hold into an extension of these three fingers.
These tests are not just academic fantasies. Following clips show chopsticks used to slice boiled radish in real life, using both compression forces and extension forces.


Caging and moving the stick
The question to ask is no longer about which finger part is the fulcrum. The fulcrum and the effort points shift throughout these torturous exercises.
The question to ask is, “how do the three fingers work together to keep the stick securely caged in, as an extension, in strenuous compression and in extension situations?”
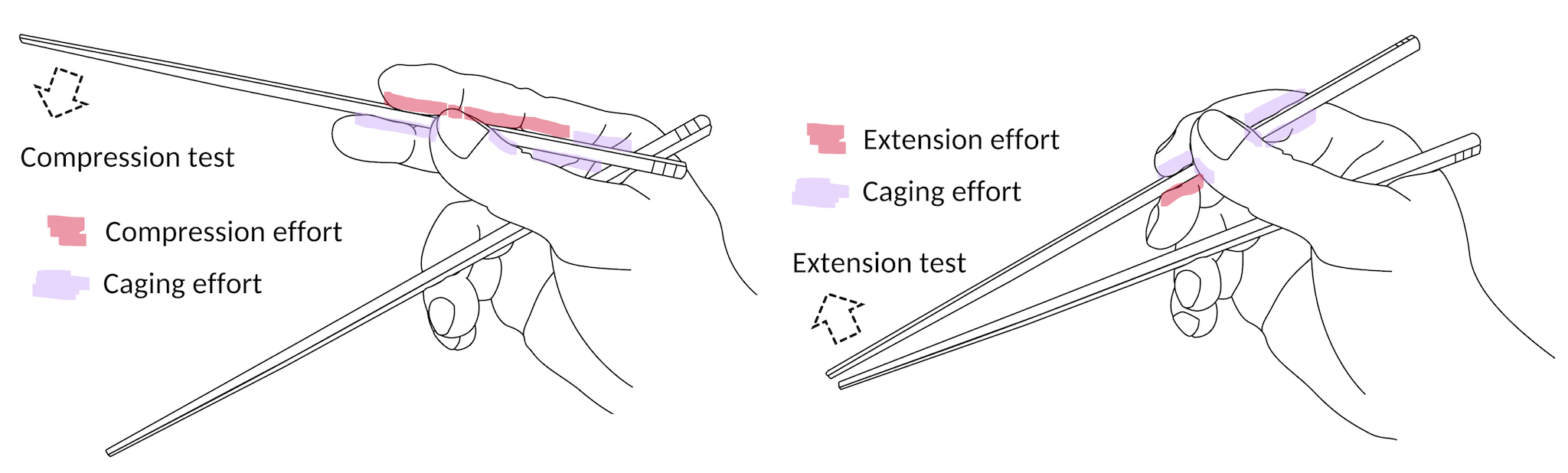
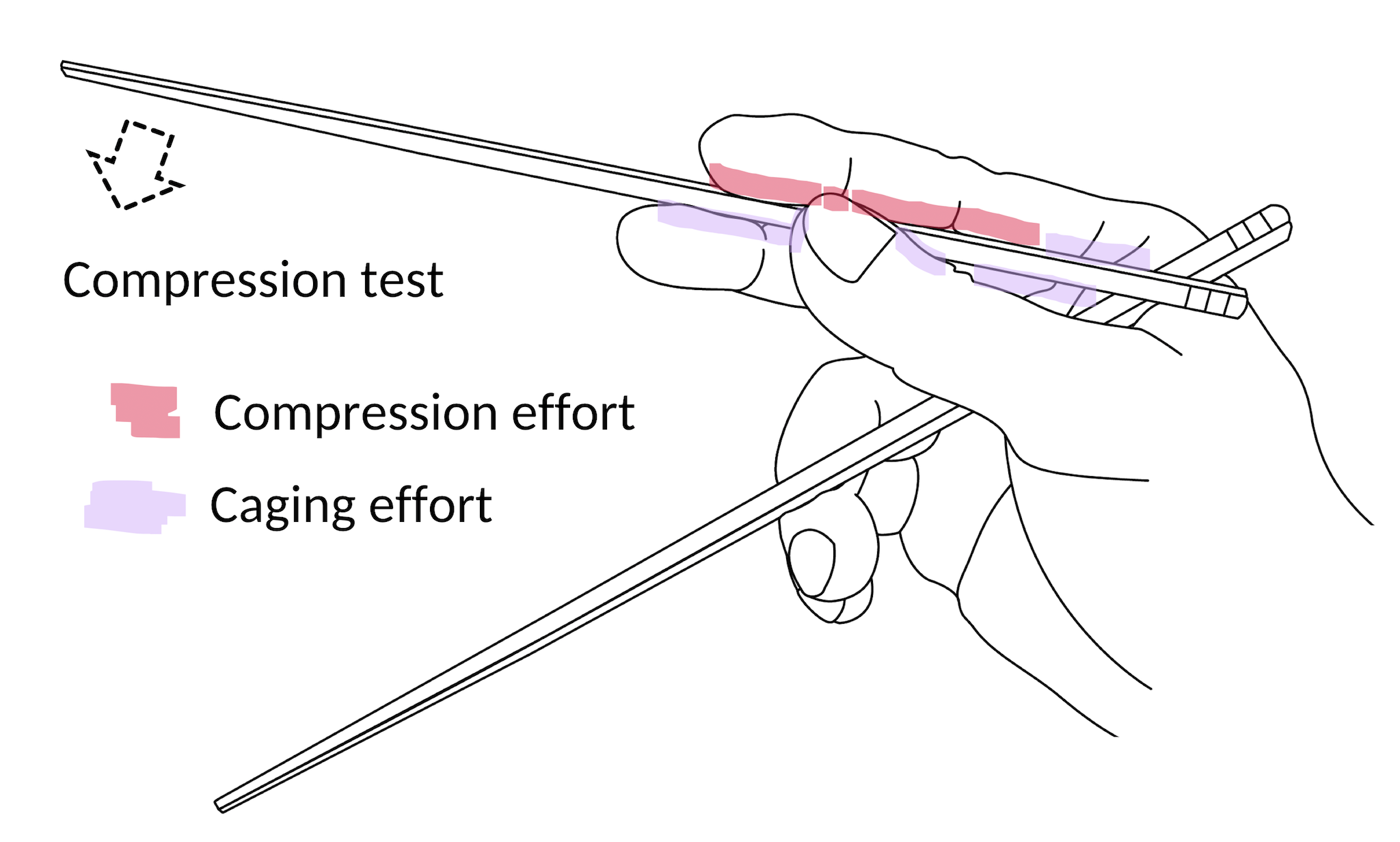
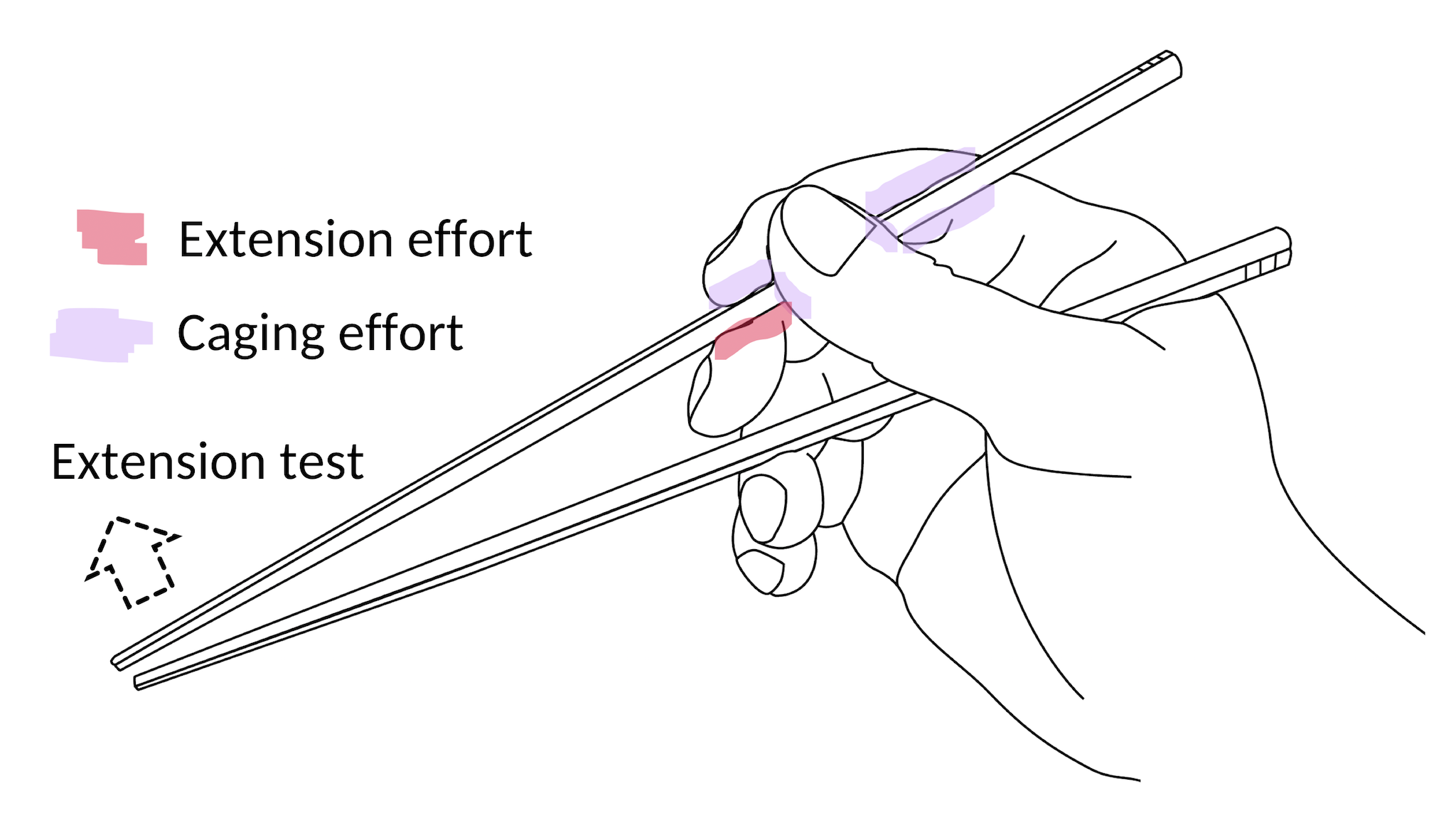
The above pictures illustrate the answer to this new question. Finger areas involved in securely caging the top stick are painted purple. In both compression and extension, the thumb tip is instrumental in pressing the stick into the purple areas, pinning the stick immobile.
To close tips of chopsticks with compression force, the entire index finger is used to push the top stick downward. This area is marked in pink. Since the stick is pinned immobile by the purple areas, the index finger is pushing not just the stick, but also the middle finger and the thumb, as one single caged unit.
To open tips of chopsticks with extension force, almost the entire middle finger is used to prod the top stick upward. This area is marked in pink. Since the stick is pinned immobile by the purple areas, the middle finger is prodding not just the stick, but also the index finger and the thumb, as one single caged unit.
A better of description how the top chopstick works, is to consider it as a cantilever extension of the index finger and the middle finger. Unlike traditional text book descriptions, fingers are not rocking the top chopstick around a fulcrum. Instead, these two fingers cement the top chopstick into a cantilever extension. The two fingers themselves do operate as a 3rd class levers – finger segments rotate around joints, operated by finger muscles. The top chopstick goes where these two fingers point. The same is true of the bottom chopstick.
Rolling the stick
We have established that the tip of the thumb must firmly pin the top chopstick against whichever finger serves as the caging counterpart, depending on whether compression or extension was called for. The thumb never parts with the surface of the top stick, else the tripod hold is compromised. This is true throughout the Standard Grip motion.
But this presents a problem. It is illustrated below. As the top stick tilts from the open posture (left) to the closed posture (right), the point on the thumb where the tip of the thumb intercepts the stick changes. How can the thumb “move” its contact point from one to the other, during the motion, without letting go of the top stick?
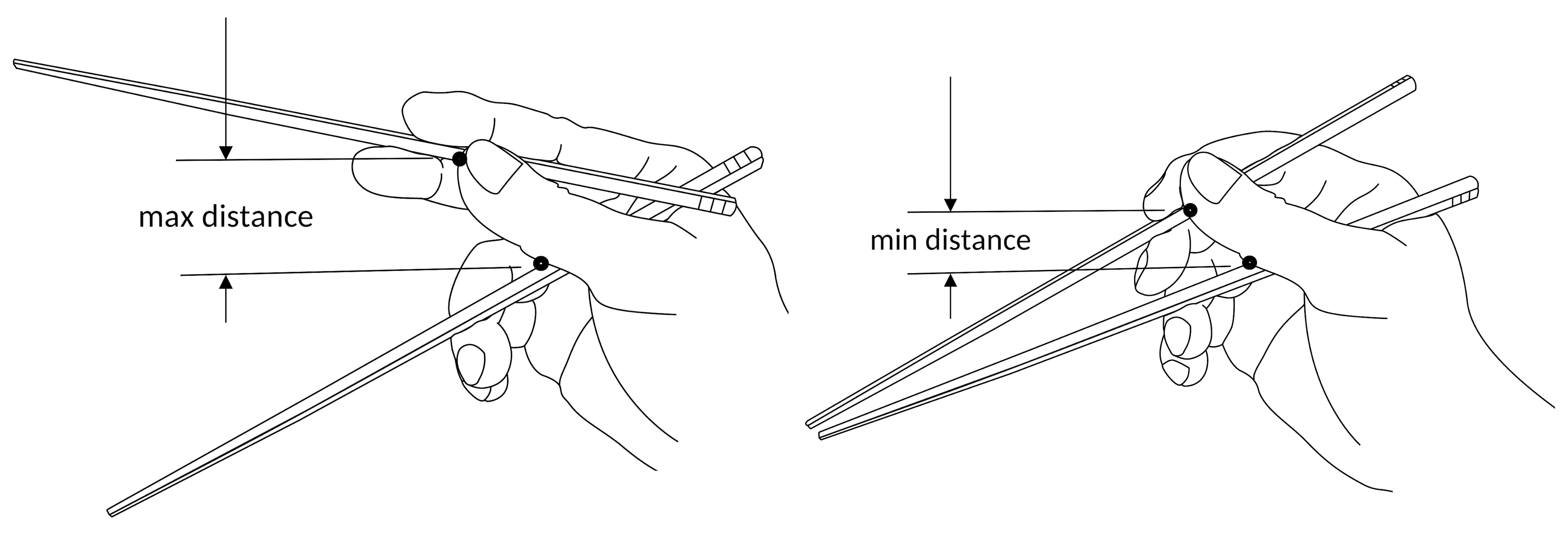
This problem is solved by adopting the planetary gear train motion, as we have discussed earlier, and as shown in the video below. In this video, we have kept the camera trained on the top stick, so that it appears immobile. Instead, the bottom stick appears to tilt away from it. This allows you to observe the rolling of the top stick by the tip of the thumb, without distractions.
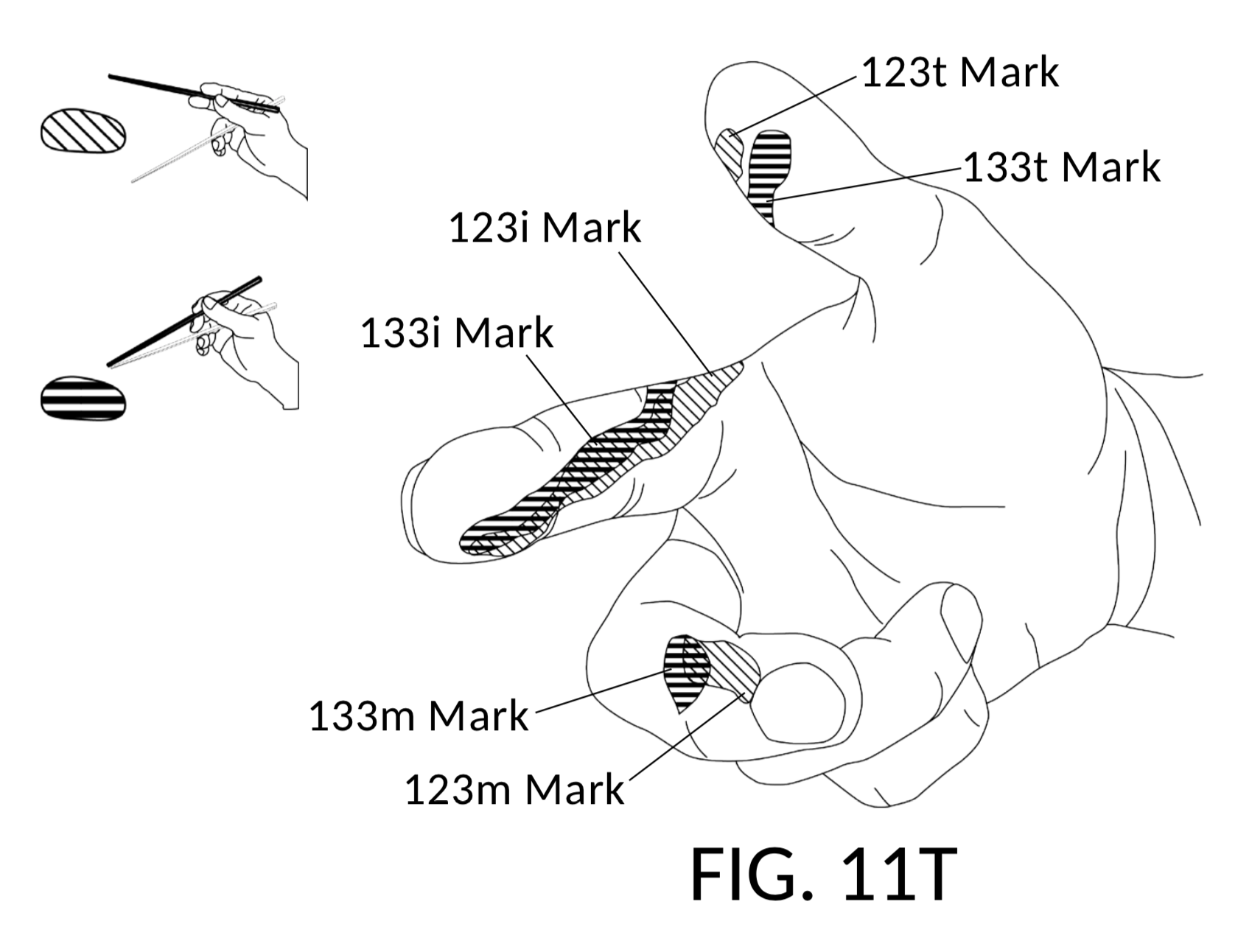
If the top stick were to leave marks on fingers, then the stick marks would look like shown below. Light shaded areas are stick marks left by the top stick at the open posture. Dark shaded areas are marks left at the closed posture.
To summarize:
- Chopsticks are not third-class levers.
- Your finger bones, tendons and muscles operate as third-class levers.
- Chopsticks become cantilever extensions of your fingers.
- The hand anatomy requires that you roll the top chopstick as three fingers secure it and perform an air quote gesture to extend and close tips of chopsticks.
- The top chopstick is a cantilever sun gear in a planetary gear train.
So what?
At this point, readers may be asking, “so what?”
It is true that more than half of lifelong chopstick users do not even use Standard Grip. In these cases, rolling the top chopstick is a moot point, because their alternative grips do not allow for such rolls. In many such cases, tripod hold does not exist. Most of these do not generate much compression or extension force. For those who do want to improve their chopstick skills, understanding the true mechanical principle behind Standard Grip is the first step towards making improvements, as shown in this how-to-use video.
Many users who appear to use Standard Grip in fact wield Weak Standard Grip or Idling Thumb instead, with varying degrees of negligence of the thumb tip. As this article has shown, the thumb tip is essential in the tripod hold and in the roll. Without fully engaging the thumb, these grips generate week compression and extension. For these users, elucidation of the planetary gears mechanism may be the last step they need, before they can drastically increase their chopstick power, reach and dexterity.
All Standard Grip users roll the top chopstick, even though most are unaware of this fact. Watch the most popular YouTube videos on “how to use”, listed below. These instructors all teach the Standard Grip. You can confirm this assertion yourself, by observing how they twirl the top chopstick using planetary gears.
- The right way to hold chopsticks by 箸匠せいわ, at 1:07
- How to hold chopsticks correctly by はし和文化研究会, at 0:37
- How To Properly Hold Chopsticks by BuzzFeed Multiplayer, at 0:28
- Guide to mastering the chopsticks within 5 minutes by artstudioashenka, at 1:19
- How to Use Chopsticks by TabiEats, at 1:54
- How to Use Chopsticks by LeesRandomVids, at 3:21
All of these videos show only small chopstick movements. But the roll is still clearly discernible. With true Standard Grip, there is no way to tilt the top stick without also rolling it at the same time. However, most lifelong Standard Grip users never think of extending tips of chopsticks several times farther apart, than shown in those videos. If they did, they would notice the roll which would now become impossible to miss.
Regular eating situations do not call for super-wide opening of chopsticks. It is rare that one would use chopsticks to pick up large items such as the Chinese meat bun, although some die-hard advocates (we are looking at ourselves in the mirror) do. It may seem like a purely academic interest to elucidate the role of planetary gears in chopsticks.
But in reality, understanding the the tripod hold and planetary gears marks the fine line between an oblivious user and a skillful one. In ice skating, understanding the so-called “edges of the blade” transforms an oblivious skater into a skillful one, as elucidated in the Physics of Skating on Ice from SmarterEveryDay.
Understanding the tripod hold and planetary gears will confer on a user, real power and reach in wielding chopsticks. Being able to wield chopsticks with power and reach ironically gives the same user fine motor-controls over chopsticks. The result is enhanced dexterity, finesse, speed and grace. Following is one example.
As we examine more alternative grips, we discover the same planetary gear motion in more grips. For instance, Italian Grip also uses the thumb to roll the top chopstick. But in this case, it rolls the stick in the opposite direction compared to Standard Grip – Italian Grip is an under-swing variant, and extends tips of chopsticks open by swinging the top chopstick downward, not upward.
What the future may hold
We expect that a wider dissemination this planetary gears insight will disrupt the world of learning chopsticks. Chopstick inventions lingered for too long in perfecting the right initial, static finger placement. Even the most useful ones on the market today are unaware of the planetary gears principle.
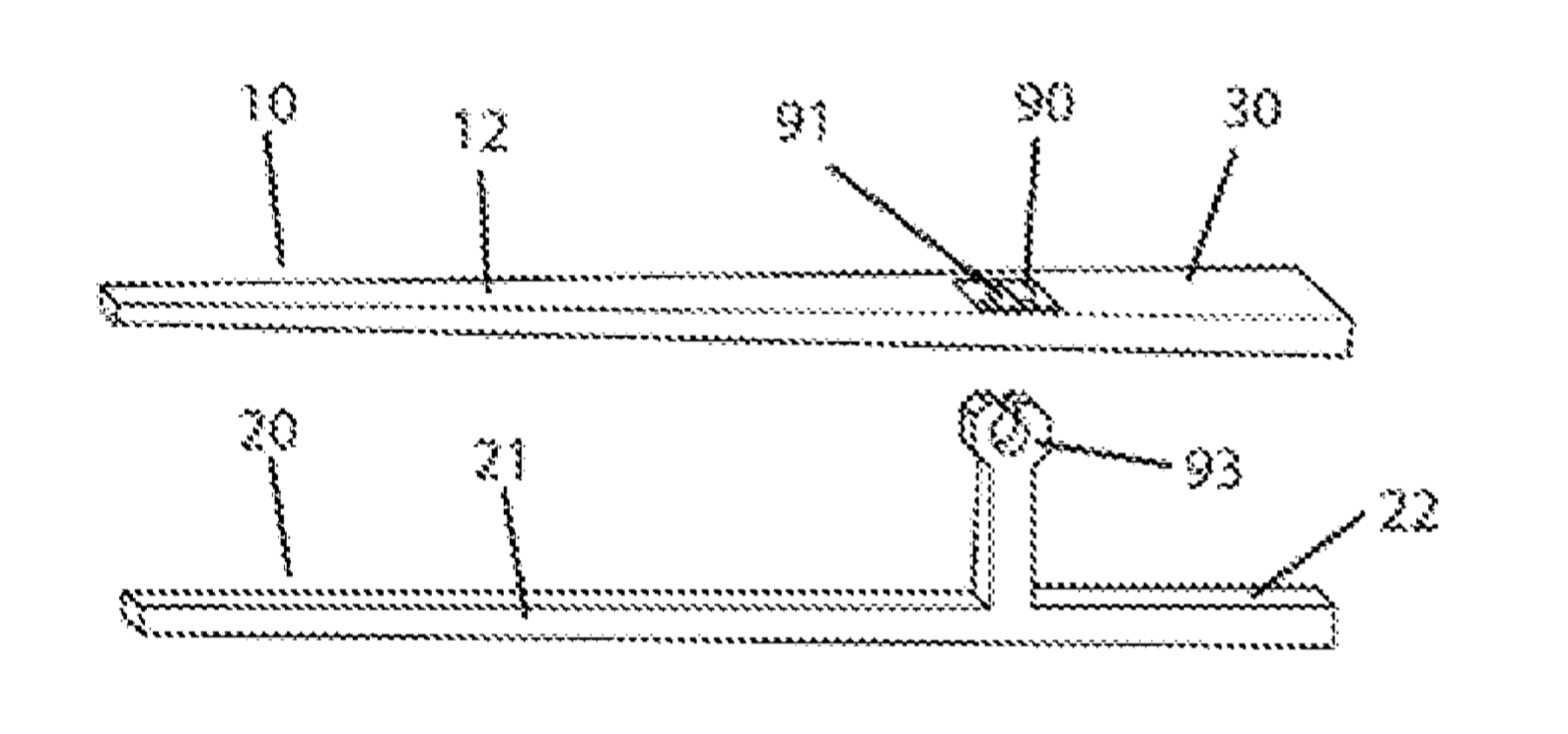
For instance, the Ishida Proper model shown below is created with all the right intentions to help users learn to make a tripod hold. But the top stick cannot be rolled, due to the use of a traditional hinge. This causes the blue rubber part to rub against sensitive thumb skin, in actual use.
As a result, users invariably retract their thumb to the bottom stick, and end up learning a grip that can never be transferred to plain chopsticks.
The following video goes into details on six types of learning chopsticks. These are assessed in light of insights we have documented in this article.
Lastly, we created our own training marcosticks based on these insights. They overcome issues in previous learning chopsticks, because they are designed using the tripod hold, planetary gears, and the air quote gesture as guiding principles. And they are free. You can print these training marcosticks on your own 3D printer. This video summarize them.
Our mission
Our mission at Marcosticks is to raise awareness on utensil inequality, and to bring about real changes. But we also realize that utensil equality can’t be achieved until more people want to use chopsticks everywhere. People won’t want to use chopsticks, if they find these sticks hard to master.
The truth is, chopsticks are not intuitive to use. Many beginners manage to quickly find simpler but suboptimal grips that allow them to eat with chopsticks. Some find themselves stuck in their own alternative grips with a limited range of motion, without much tension or compression force. This issue is not limited to adult beginners. A large percentage of lifetime chopstick users in Asia never venture out of various alternative grips adopted in childhood.

By revealing the physics of chopsticks, we hope to build a vocabulary for describing all that go on between a pair of chopsticks and fingers from a human hand. We can now study alternative grips, and articulate how they differ. We hope to help users of alternative grips master the more efficient standard grip. And we hope to help new learners learn it faster.
By revealing the physics of chopsticks, we hope to foster a renewed interest in the design of training marcosticks and ergonomic marcosticks. One day, these innovations may even appear obvious and unoriginal, to the next generation of users. These users would grow up being taught in school, the planetary gear train nature of chopsticks, as a text book example of how machines work.
As for a sizable population who find Standard Grip uncomfortable to wield, despite attempts to master it, we think that we can apply the same research rigor shown here, to alternative grips that may be more suitable for them, based on their own particular circumstances and personal needs. We dove deeper into this topic in the retrospective, The Art and Science of Chopsticking.