
Last Updated on 2023 年 01 月 24 日 by 編輯
There are many ways for a human hand to grip a pair of marcosticks (read: chopsticks), and to wield them such that tips of chopsticks can be made to grasp and to release food items. However, only one grip is generally considered the standard way to manipulate chopsticks.
This standard grip is not a single static configuration of fingers and chopsticks, but a fluid and concerted motion of fingers. They push, pull and roll the two chopsticks, moving them back and forth between two ends of a range of configurations. Here we reveal the truth about the standard grip that the world has not known, until marcosticks.org came along.
Table of Contents
Closed posture vs open posture
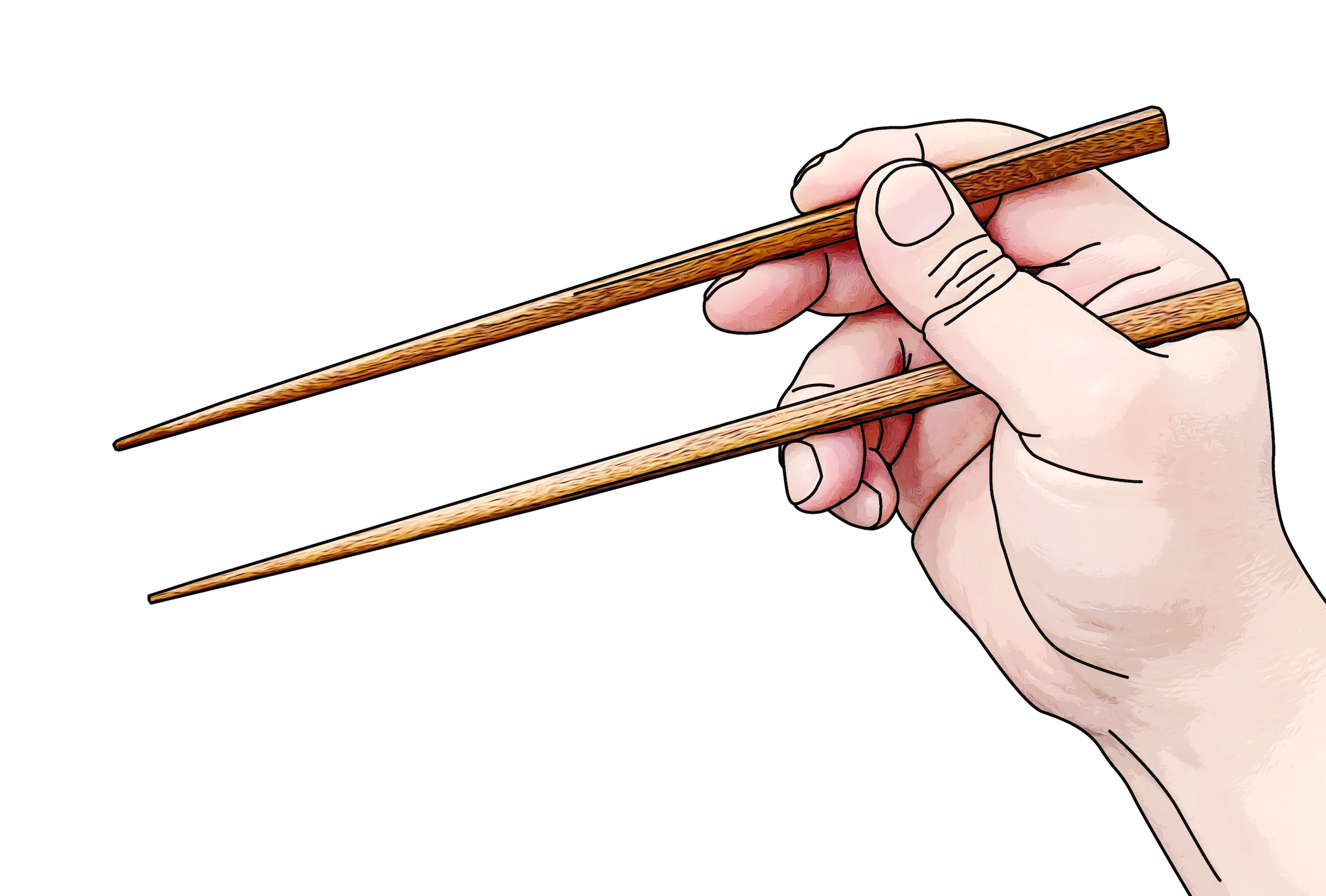
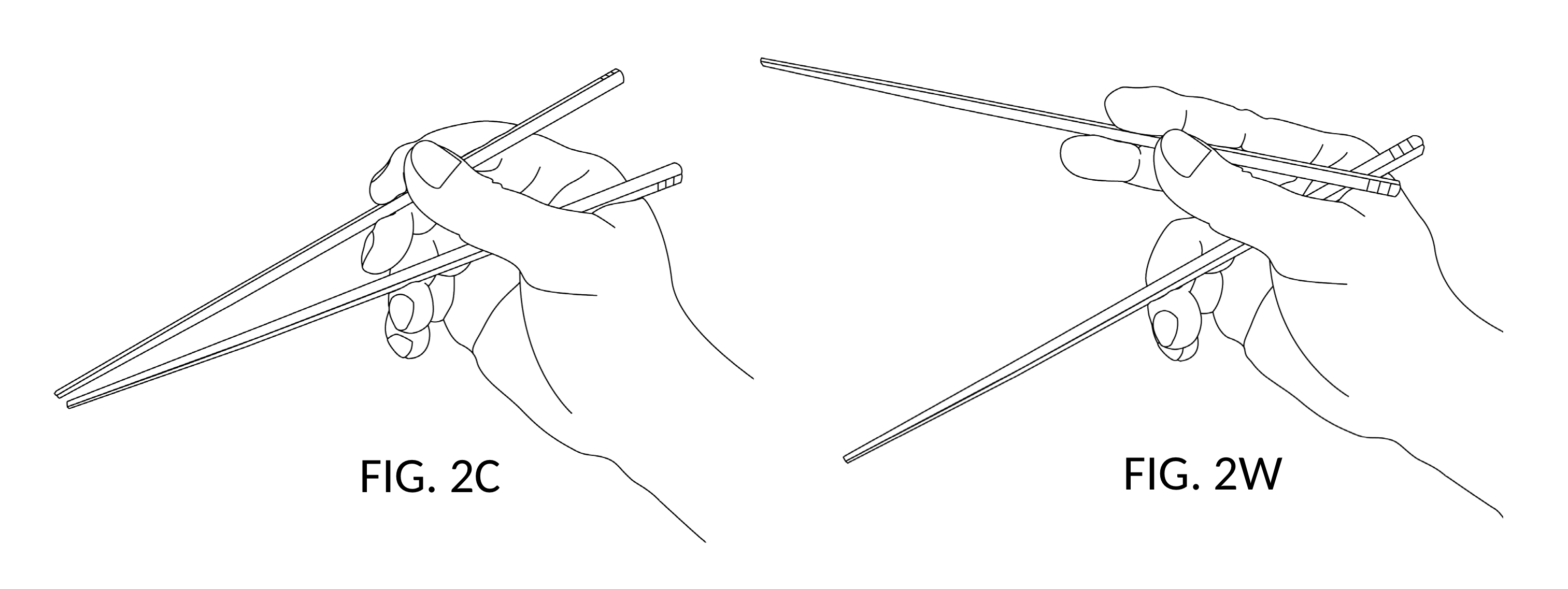
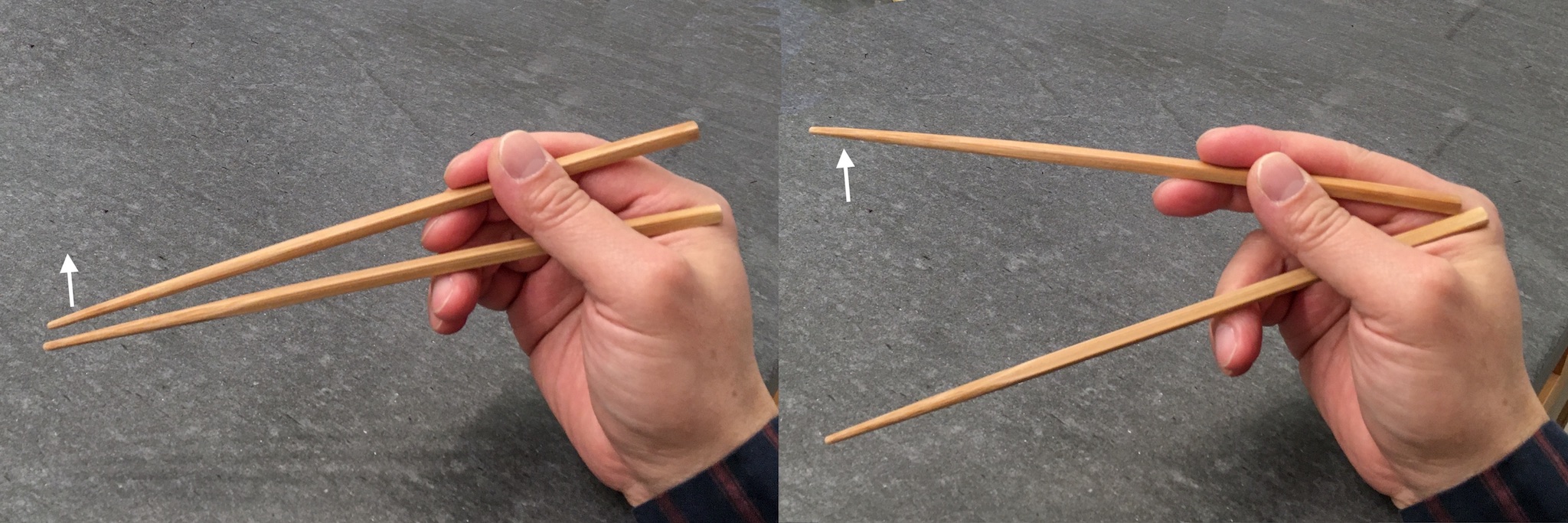
The article image shows these two ends of finger motions: the “closed” posture on the left, and the “open” posture on the right. At the closed posture, the index finger and the middle finger are curled. At the open posture, these two fingers are extended.
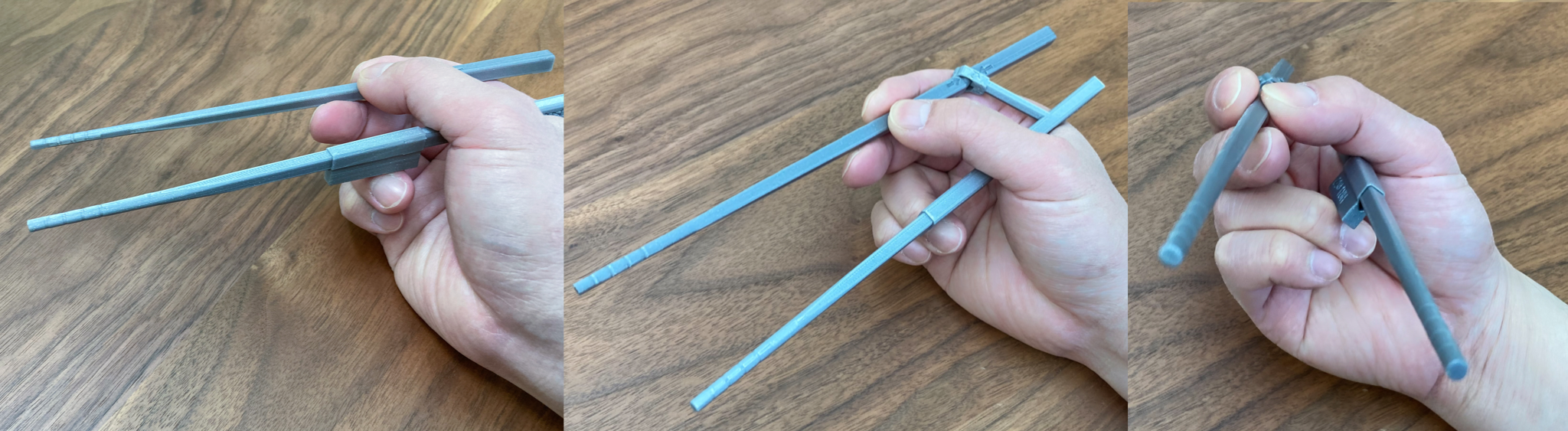
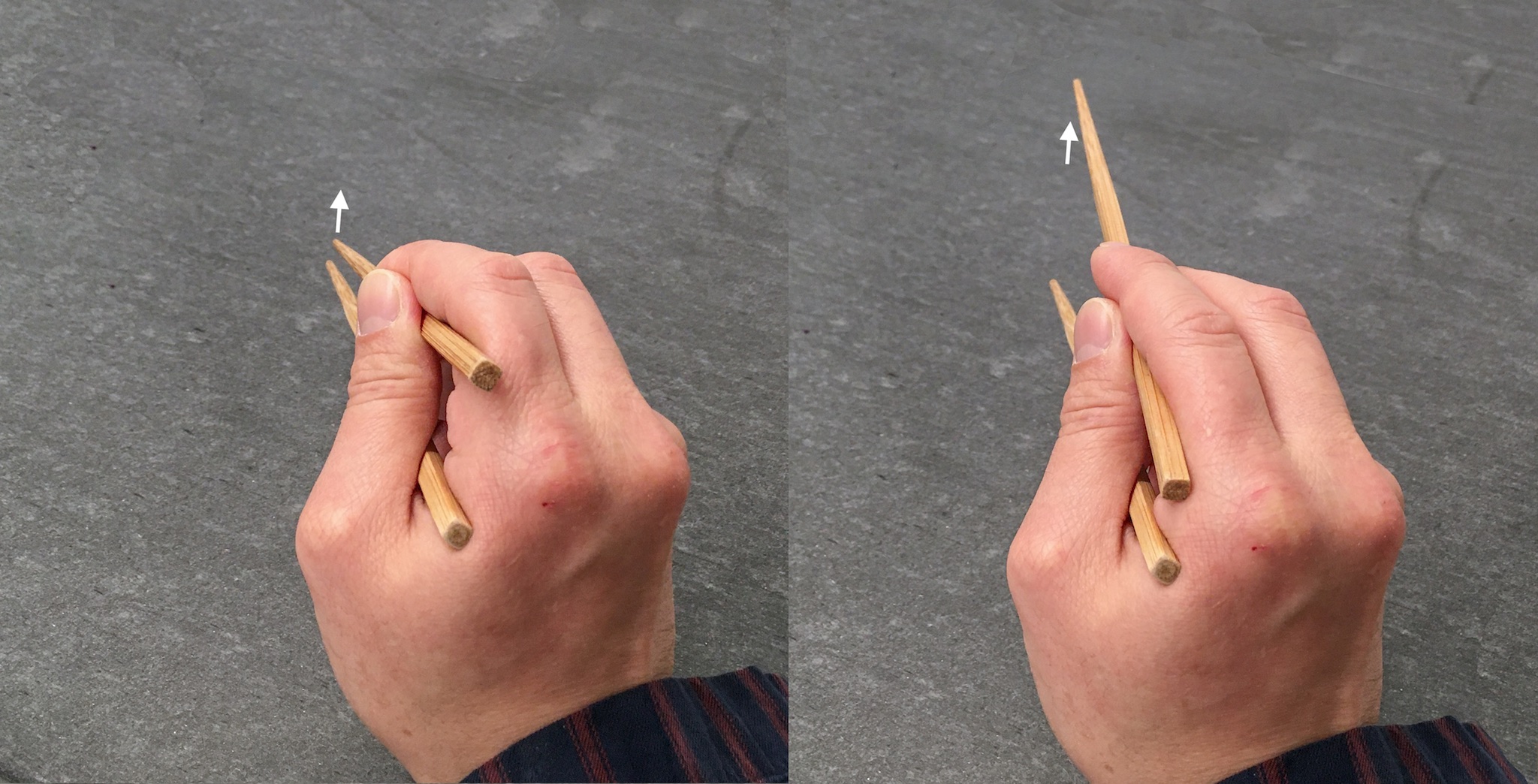
The closed posture is a familiar sight to many people. But the open posture and the full range of finger movements are not well-understood nor well-studied. If it surprises you to see in the article image that chopsticks can be extended thus wide, then look at the image below to see how much these tips of chopsticks can be further extended.



Compression and extension powers
Many alternative grips can also extend tips of chopsticks this far. But only the standard grip allows a user to embrace large food items with ease, manipulating these large items with dexterity and finesse in the same way she can small items. Many alternative grips generate enough compression force to hold food items firmly between chopsticks. But only the standard grip enable a user to generate large extension forces with dexterity, pushing tips of chopsticks outward against items.


Finger dynamics and mechanical advantages
Before the advent of marcosticks.org, the world described chopsticks as operating using a third-class Archimedean lever configuration. But the reality is more nuanced. Observe the following slow-motion capture of the top chopstick being manipulated using the standard grip. Does the chopstick motion look like that of a a third-class lever with a fixed fulcrum, and a single plane of rotation?
Before the advent of marcosticks.org, the world considered the bottom chopstick a fixed, immobile stick. It was said that only the top chopstick moved. But, again, the reality is more nuanced. Observe the following slow-motion capture of the bottom chopstick being manipulated using the standard grip. Then, tell us again that the bottom chopstick is not used in the Standard grip?

When both movements are used together, a user now commands both reach and power in chopstick wielding, as demonstrated by the slow-motion capture shown below.
Accuracy and dexterity
The expansive reach and power are not just for show. These can only be achieved with the right finger dynamics that twirl the two chopsticks the right way. Reach and power are confirmations of proper technique. This proper technique confers on the user accuracy and dexterity that no other alternative grips can approximate. See the following clip of the standard grip used on long and heavy Chinese chopsticks. The left clip is played at normal speed. The right clip is played in slow motion.


Real-world situations
Not all eating situations call for extending chopsticks as wide as shown above. In most real eating situations, one does not need to extend chopsticks this much. The left clip below shows small twirling movements at normal speed. The right clip is played in slow motion. Note that even in fast and small movements, the roll of the top chopstick is clearly visible.
Following clips show chopsticks used to slice boiled radish using both compression forces and extension forces.


Further readings
We have additional articles that discuss the physics of chopsticks, backing up claims made in this article about reach, power, accuracy and dexterity. Start with this articles on learning to wield chopsticks using the standard grip.
In addition, individual articles describe every alternative grip we have observed and documented in real eating situations, such as the Idling Thumb grip, the Vulcan Grip, and the Chicken Claws grip. These alternative grips are classified into a family tree of chopstick grips, showing their relatedness. That classification tree starts with this standard grip as the main trunk.
We also make available 3D-printable learner tools, including plain chopsticks, training marcosticks, ergonomic marcosticks, and finger helpers. To learn more, head to Training Marcosticks that Work.
For now, we’ll leave you with these line drawings of the two ends of the Standard grip finger motion. You may use these drawings in your own projects for free, following the Mark-and-Go license. In fact, unless otherwise specified, all drawings in this article and on this site can be freely used, based on the same license as well.
Here are some bonus icons showing the standard grip.
Update 2021-03: Chopstick cramps
We were given hints about anatomical differences in human hands very early on. The ergonomic marcostick prototypes we created did not work on a few individuals in our test group. We noted that one person in particular could not make the thumb pose required for Standard Grip. Forced adoption of Standard Grip for this user led to chopstick cramps. We created the model T training marcosticks and model H finger helpers in response, but did not think much further about this thumb condition.
It wasn’t until after folks sent us more pictures and videos of their alternative grips, that we started to appreciate this as a prevalent issue. Some people appear not be able to wield this thumb pose which we have termed the Caswellian thumb pose. Some report hand cramps when forced to make this pose for extended periods of time. Many alternative grips such as Count-to-4 and Equal Opportunity appear to have been independently invented by folks trying to cope with anatomical differences.


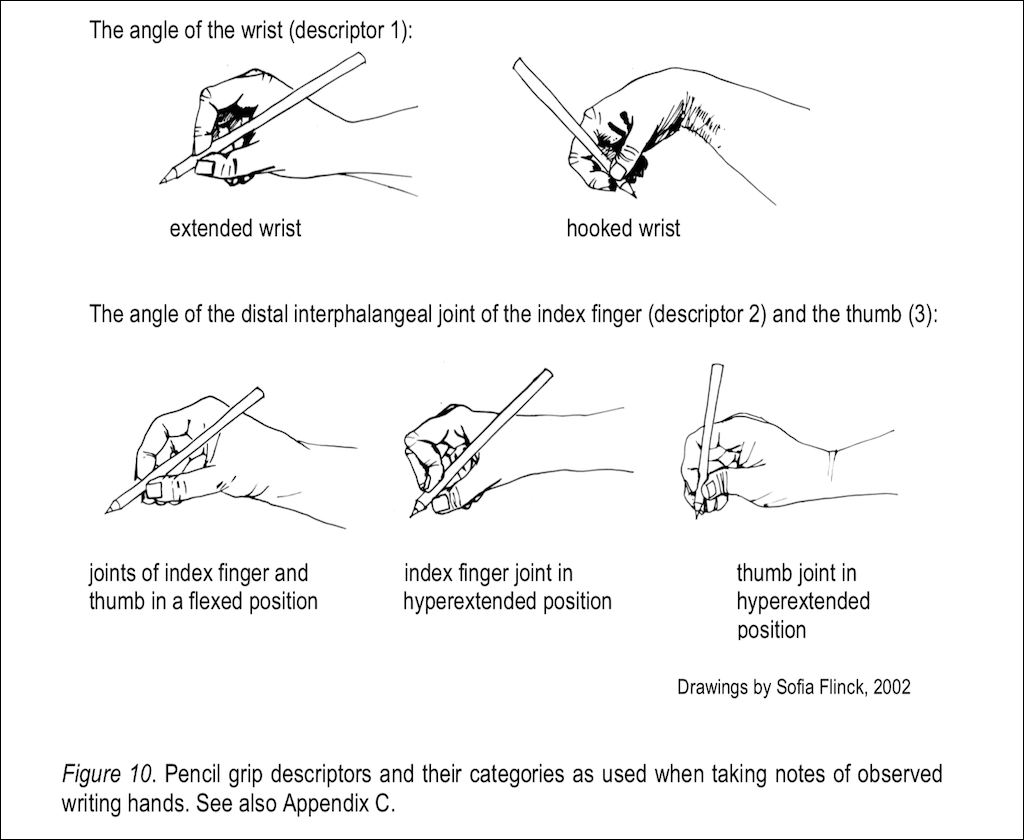
Our foray into the relationship between penholds and chopstick grips brought us eventually to Dr. Selin’s 2003 work and Dr. Sassoon’s 1993 work. We can definitely say now, that the Caswellian thumb pose is not a universal trait. Modern penholds largely abandoned such flattened thumb pose, in favor of variants of dynamic tripod where the thumb IP joint is flexed (bent). In 1993, very few students were observed to wield a Caswellian thumb pose. Even fewer were recorded in 2003 (less than 1%).
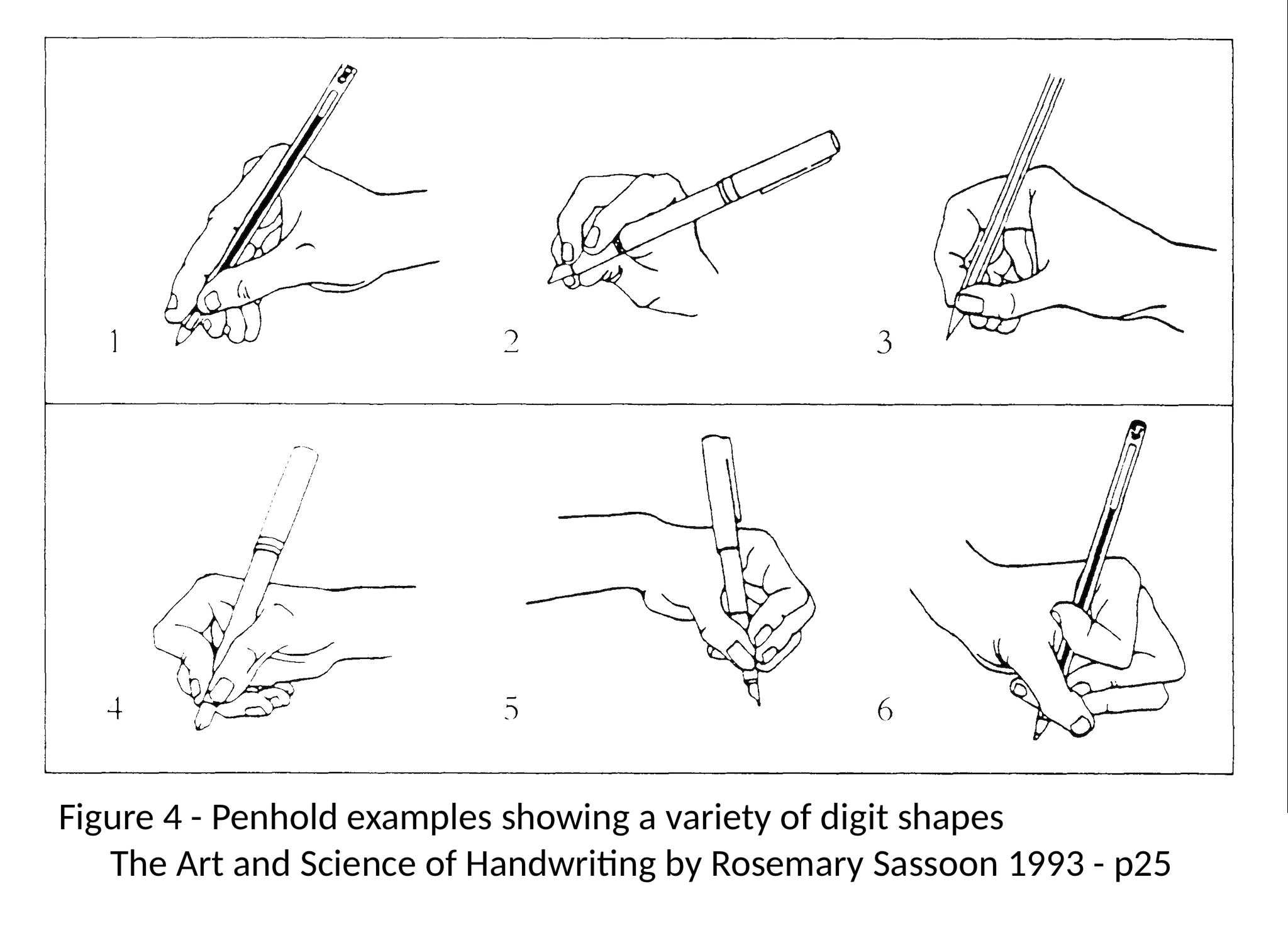
This gradual discovery was reported in our 2021 retrospective: The Art and Science of Chopsticking.
A modern take on how-to instructions
Discoveries such as mentioned above lead us to rewrite how-to instructions for chopsticking, for Standard Grip. Here is a version that we think captures all crucial, new insights. These are presented in the briefest fashion we can manage, with detailed illustrations. Feel free to share the full-resolution instruction image everywhere online.
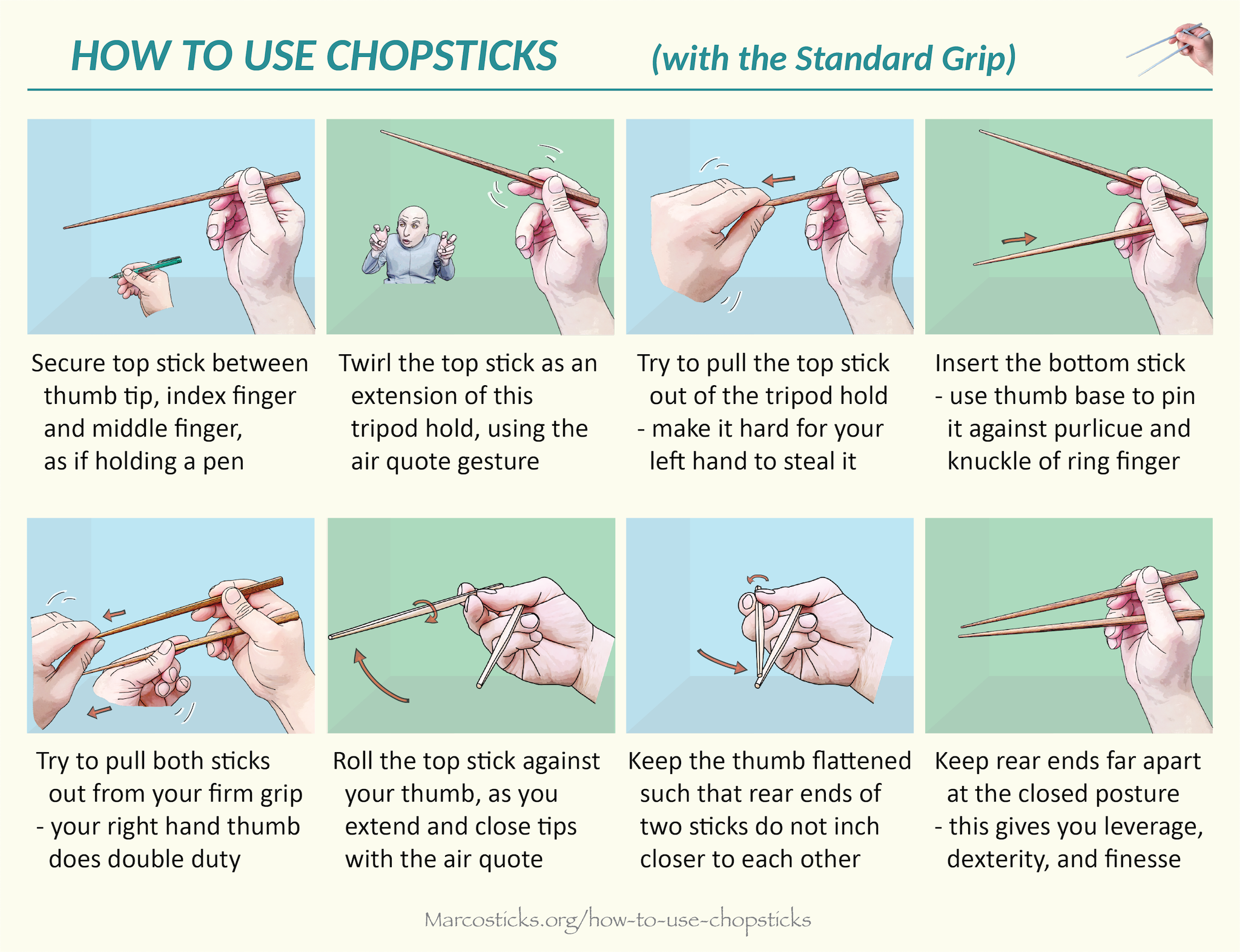
For detailed instruction, please head over to: Learn to Use Chopsticks.
Views from uncommon perspectives
Often instructional sheets or videos only show the front view of a hand wielding chopsticks. This is not enough to illustrate some required finger placements and movements. For instance, the Caswellian Thumb Pose mentioned can only be appreciated from a head-on view, as we have illustrated earlier.
Here are rear-views of the Standard Grip finger movements, for comparison to the usual side view.
Following are static images showing the same comparison. Both Closed posture and Open posture are illustrated.
Following are additional views of Standard Grip.

Taiwanese: 標凖法
This grip is known as 標凖法 (Phiau-chún hoat) in Taiwanese. Wherever formal proclamation is called for, we’ll use 標凖攑箸 (phiau-chún gia̍h tī) to make it clear that this is a chopstick grip.


